Agriculture constantly has to adapt to real-world changes in climate and weather. This year has been particularly wet so far, making it almost impossible for traditional farming machinery to move on the field. Wet and muddy conditions prevent the fertilizing of the fields and therefore present a real threat to the potential yield. Traditionally, fertilizing would have to be pushed far back into the season to wait for better conditions, so farmers are looking for alternatives.
In those conditions, a drone can come in handy as it is not affected by the conditions of the soil. Here the challenge lies in the high application rates, more than 100 kg per hectare. Join us on our journey as we help the Havellandhof, a farm close to the German village Ribbeck. Together with the Institute of Agricultural and Urban Ecological Projects (IASP), we are doing nitrogen fertilization on one of Havellandhof’s fields. We will show you through this challenge, showcasing the preparation and the execution of the mission, and later talk about a few key learnings that we had during our mission.
Preparation
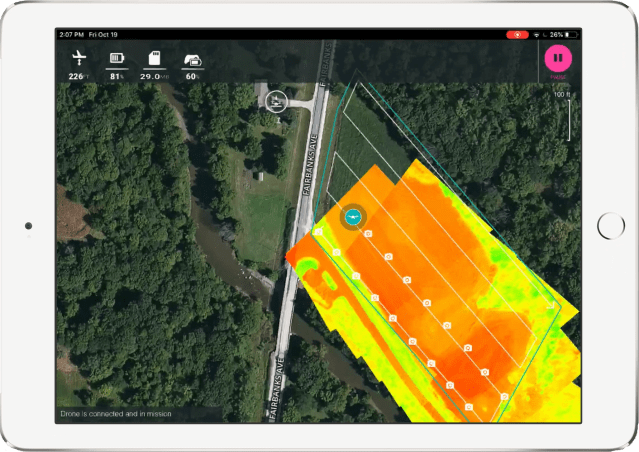
As for any big challenge, preparation is the key to efficient drone operation, regardless of mission type. The first step in the planning was to make an orthomosaic of the field with a mapping drone. The field has a size of around 27 ha. The mapping of the field and generation of the map took around one hour. With the field mapped, we were able to identify puddles, cultivated areas, and areas where plants have not been able to grow. This information is necessary to determine the flight path of the drone during the fertilization process. For example, the application of fertilizer in the puddles was not wanted, so we planned ahead accordingly by modifying the flight path of the drone around the puddles. This flexibility is one of the key strengths of the drone.
The next step was to divide the field into manageable polygons. The key goal for the division was to minimize the distance flown without application or with an empty tank. Therefore, a couple of parameters had to be determined:
Application rate: This is the most important parameter for any spreading mission as it is the limiter for most other parameters such as polygon size, flight speed during application, or necessary volume flow. It also serves as a baseline to determine all other parameters. For this mission, our goal application rate was 60 kg of nitrogen per hectare. The fertilizer itself has 46% nitrogen, bringing the total application rate to 125 kg of fertilizer per hectare.
Tank volume: This parameter influences the size of each polygon. The tank of the CS50 drone holds up to 30 l volume. For this fertilizer, it meant that we could comfortably carry 25 kg of fertilizer per flight. Together with the application rate we can now determine the size of each individual polygon to be 0.2 hectares.
Flow rate: With this parameter, we are able to calculate the horizontal flight velocity for each polygon. To find it we filled up the tank of the drone with fertilizer and ran the dosing shaft for 90 sec. We then measured the total weight of fertilizer that was pushed out by the dosing shaft at that time. This gave us a flow of 85 grams of fertilizer per second. Together with the size of the polygons we can now determine the flight velocity to be around 0.7 meters per second.
Polygon shape: Lastly we needed to define the overall shape of each polygon. Again, the goal was to minimize the number of flights without application or with an empty tank. This means keeping the starting point and the endpoint of each mission as close to the takeoff point as possible and only using a turnaround when necessary. Under these circumstances, the best shape was a polygon with a rectangular shape and dimensions of 20 meters by 100 meters.
With all those predetermined parameters it was time to cut the field into the segments. This worked mostly but due to the puddles, and the overall shape of the field, it was not always possible. In these cases, the polygon shape was changed to fit the circumstances while keeping the size at around 0.2 hectares. This way we could ensure that the mass of fertilizer would be sufficient for each polygon.
Execution
With the preparations done, it was time to move on to the execution. The day of the execution promised nice weather with low wind conditions which made it ideal to to fly the drone and spread the fertilizer. We loaded up the car and made our way to the field. Since we had made a good plan it was simply a matter of filling the tank, loading the path onto the drone, and executing the mission. The groundwork was split into two positions. One person was refilling the tank and checking the batteries, while the other person was responsible for the piloting. This way our ground times have been around 2 minutes per mission.
Here’s what a typical flight looked like:
First, the tank was filled and the remaining battery capacity was checked. If the battery capacity was not sufficient enough for the next flight, the battery was changed to a full one.
During filling the pilot loaded the next mission into the Fluktor app and checked the settings.
Once all settings were confirmed and the drone was ready to go, the pilot took off manually and flew to the starting point of the mission.
Then the mission was started within the Fluktor App. The drone executed the mission fully autonomously.
Once the mission was finished the pilot took over the sticks again to fly the drone back to the car for refilling and a potential battery change.
To charge the batteries in the field, we utilized a petrol generator. The generator had enough power to simultaneously charge two batteries. This meant that we could ensure continuous operation with two chargers and six batteries. During our first flight, we were able to cover an area of 3.2 hectares in three hours. During those three hours, we had a total of two hours of flight time and one hour of ground time.
Key Learnings
During these first tests, we learned a lot to improve the system and also the workflow. The first thing we learned is that preparation is key. This is especially true for the planning of the individual missions as it would take some time in the field to adjust them. This can lead to small inefficiencies that could, over time, lead to less area coverage at the same time. Secondly, we learned that it is much faster to fly the drone manually to the starting point of the mission. This is due to a higher velocity that can be reached in manual flight. This also applies to the return back to the pilot.
We have also learned that the dosing shaft is not big enough for these high application volumes. It would be better to increase the volume flow. If the volume flow were higher, we could fly faster during the missions. This change can already be made due to the versatility of the Lehner FlyDos Spreading unit. We can change the shaft to one with bigger cell wheels, increasing our volume flow. This would lead to an overall increased efficiency. First tests with bigger cell wheels showed an increased volume flow from 85g/s up to 200g/s, almost tripling the flow.
We have now implemented our key learnings for our next tests to see the improvements we can yield. Stay tuned for updates on this matter in the next few weeks.
Experiment on spreading width on the IASP site
The results of the application were published in the online edition of agrarheute on 28 February 2024.
In defiance of inclement weather conditions, we conducted tests last week addressing the challenge of precise altitude control in uneven terrain. The drone’s altitude above ground directly influences the working width and the dispersion of spray mist, penetrating foliage with precision, an aspect crucial in agricultural applications.
Fluktor pursues an innovative approach by incorporating detailed elevation data into the flight planning process. In this methodology, distance sensors serve solely for collision avoidance. When the „calculate above ground“ option is selected in mission planning, a flight path is computed with a relative distance to the ground profile. Elevation data is sourced through an internet service utilizing satellite data, with a resolution typically around 30 meters per pixel, sufficient for moderately undulating terrains with sparse vegetation. However, when accounting for bushes, trees, rocks, or steep inclines, especially during low-altitude flights, we recommend employing photogrammetric height profiling before mission planning and execution.
The procedure involves flying a photo drone at an altitude of approximately 70 to 120 meters, capturing images, and processing them reliably with tools like Pix4DCapture and Pix4DFields. The subsequent generation of a high-resolution orthomosaic and surface model yields profile data with a resolution typically in the centimeter range. This elevation profile can be exported from Pix4DFields and seamlessly integrated into the flight planning software. The resolution disparity is visible in the video at 0:42 minutes compared to 0:37 minutes, showcasing the precision of the photogrammetric assessment in detecting field vegetation height, trees, and bushes.
Our tests were conducted at relatively low speeds of 2.5 m/s and altitudes of 10 meters and 5 meters, with the mission planning algorithm calculating intermediate points at varying altitudes for the drone to traverse. Satisfied with the results of these tests in viticulture, the drone maintained the pre-planned altitude with impeccable precision. Further experimentation awaits us, adjusting ascent speed and the number of intermediate points to ensure a uniformly controlled flight. As we progress into spring, our focus will shift to spreading and spraying trials in the same terrain. We want to thank Weinbau Rapp near Halle for allowing us to conduct these tests.
Insektenschutz ist ein wichtiges Thema, das uns alle angeht. Es gilt, Lebensräume von Insekten zu erhalten, Lichtverschmutzung zu reduzieren und den Einsatz von insektengefährdenden Chemikalien in die Umwelt zu reduzieren.
Verschiedene Gesetze und Verordnungen wurden dazu verabschiedet, z.B. die Düngeverordnung oder das Insektenschutzgesetz.
Insektenschutz ist vorrangig natürlich kein juristisches Problem sondern vor allem eine praktische Frage.
Wie kann man Insektenschutz in der Praxis umsetzen?
Wie können Drohnen und Fernerkundung beim Insektenschutz helfen?
Technik
Was benötigt man dazu? Der größte Kostenfaktor ist sicher die Technik für teilflächenspezifische Anwendungen, d.h. eine Feldspritze mit Jobrechner, besser noch mit Teilbreitenschaltung und Einzeldüsensteuerung.
Preiswerte Fotodrohnen um die 700 EUR aus dem Elektronikmarkt, zum Beispiel die Parrot Anafi oder die DJI Phantom 4 eignen sich gut für den Einstieg. Die Software, die wir hier vorstellen möchten, ist ab ca 130 EUR pro Monat erhältlich.
Karten und Genauigkeit
Herangehensweise und Arbeitsschritte wollen wir anhand eine konkreten Datensatzes eines Weizenfeldes in der Nähe von Prötzen in Brandenburg erläutern. Das Feld wurde in 100 m Höhe mit einer Drohne und einer Multispektralkamera beflogen.
RGB Orthomosaik mit Feldbegrenzung
Die sogenannten Orthomosaiken und Indexkarten wurden aus den Luftbildaufnahmen mit Pix4Dfields errechnet.
Die Genauigkeit hängt davon ab, wie die Luftbildaufnahmen aufgezeichnet wurden. Standard GNSS-Systemen (meist wird eine Kombination aus GPS, Glonass, Galileo und Beidou verwendet) ermöglichen Genauigkeiten in der Praxis von 0,5 m bis 3 m. Genauigkeiten von bis zu 1-2 cm lassen sich erreichen zum einen, indem Störungen des GNSS-Signals durch ein RTK-Signal korrigiert werden. RTK-Drohnen sind deutlich teurer als Drohnen ohne RTK-Unterstützung, jedoch ermöglichen sie ein problemloses Zusammenspiel in bezug auf die Genauigkeit zwischen Traktorlenksystemen und Anwendungskarten, die über Drohnenfernerkundung gewonnen werden.
Die zweite Möglichkeit ist eine Positionskorrektur der Karten mithilfe von Bodenkontrollpunkten oder GIS-Werkzeugen, die in einem weiteren Beitrag dieses Blogs beschrieben werden.
Zwei Sachen fallen in unserem Weizenfeld auf: Erstens ist der Pflanzenwuchs deutlich inhomogen. Und zweitens gibt es hier ehemalige Tümpel, die auf früheren Satellitenbildern noch als Wasserflächen zu erkennen sind. Sie sind wahrscheinlich klimawandelbedingt ausgetrocknet, wie auch an vielen anderen Orten in Brandenburg zu beobachten ist. Dennoch, diese Stellen und auch die Wegesränder sind wichtige Insektenlebensräume, die wir mit 10 m breitem Abstand zu unseren Feldanwendungen schützen wollen.
In einem ersten Schritt werden wir dazu im Orthomosaik den Bereich des Feldes kennzeichnen, der für die Feldanwendung überhaupt in Frage kommt. Diesen Bereich zeichnen wir als Begrenzung ein.
Es gibt jetzt zwei Möglichkeiten, den Bereich für die Feldanwendung zu kennzeichnen. Einmal können wir eine Feldbegrenzung – eventuell ist diese schon digital vorhanden – in einem GIS-Tool dahingehend bearbeiten, Schutzgebiete entsprechend zu markieren und von der Schlagbegrenzung zu subtrahieren. Diese Daten können dann als Shapefile oder Geojson in Pix4Dfields importiert werden.
Zum zweiten kann man auch in Pix4Dfields den Anwendungsbereich einzeichnen. Die Schlagbegrenzung kann hier in mehreren Teilflächen als sogenanntes Multipolygon beschrieben werden. Zur besseren Orientierung zu den Dimensionierungen helfen uns zusätzliche Abstandsmarkierungen.
Dieses Multipolygon möchten wir nun als Schlagbegrenzung nutzen. Dazu exportieren wir das Multipolygon und importiere es als Feldgrenze. Mithilfe der Feldgrenze kann nun das Orthomosaik entsprechend zugeschnitten werden. Als Resultat sind unsere Insektenschutzgebiete von der Planung der Feldanwendung wie gewünscht ausgenommen.
Indexkarten
In Vorbereitung auf den nächsten Schritt sehen wir uns die Ungleichmäßigkeit an, die wir hier in den Bilddaten sehen. Ohne nähere Kenntnisse der Umstände des Anbaus können wir dazu leider wenig sagen. Bodenverhältnisse, Krankheiten, Wassermangel, Nährstoffmangel, Unkrautnester, Schädlingsbefall – die Gründe können vielfältig sein und die Erfahrung des Landwirts ist gefragt.
Grundsätzlich gilt es, den Ertrag zu sichern, aber gleichzeitig den Eintrag von Chemikalien in die Umwelt so weit wie möglich zu minimieren. Das gilt für jede Art von Anwendung, ob nun Düngung, Wachstumsregler oder Herbizide.
In unserem Beispiel nehmen wir mal an, unsere Entscheidung ist es, Stickstoff zu düngen. Die Düngeverordnung macht uns hier genaue Vorgaben abhängig von Vorfrucht, Ertragserwartung, Sorte und Standort. Wir stellen eine Beispielrechnung auf und gehen von maximal 160 kg/ha Reinstickstoff für den Schlag aus, die wir aufteilen wollen in 3 Gaben. Die Düngeverordnung macht keine Aussagen, wie diese Gesamtmenge auf dem Schlag verteilt wird, so dass sich hier ein Spielraum ergibt, mehr oder weniger pro Teilfläche auszubringen je nach Bedarf, solange die Gesamtstickstoffmenge für den Schlag verordnungskonform ist.
Anwendungskarten
Die Ungleichmäßigkeiten, die deutlich im NDVI zu sehen sind, helfen uns nun, die Düngung teilflächenspezifisch zu planen. Wer keine teure Multispektralkamera zur Verfügung hat, kann auch mit einer preiswerten Consumer-Fotodrohne arbeiten, aus den RGB-Karten einen TGI-Index in Pix4Dfields berechnen und wird in der Regel auch hier Wachstumsunterschiede schon gut erkennen können.
Auf Grundlage dieser Indexkarten möchten wir zunächst Teilflächen mit ähnlichem Profil zusammenfassen. Wir wählen dazu im Zonenwerkzeug von Pix4Dfields vier Abstufungen in normaler Auflösung.
In unserem Beispiel planen wir eine Startergabe von 70 kg N/ha, bei 45,28 ha Schlaggröße ergibt das maximal 3.2 t Reinstickstoff, bzw. wenn mit KAS gedüngt wird 11.8 t Gesamtdüngermenge. Diese verteilen wir auf die 4 Zonen. Als ersten Ansatz wählen wir Abstufungen von 10-15%. Bereiche mit guter Entwicklung wollen wir weniger düngen und schwächere Bereiche fördern, bei der zweiten und dritten Gabe drehen wir das Schema dann um. Pix4Dfields rechnet dabei den Gesamtbedarf aus. Wir ändern die Zahlen so lange, bis wir ca. 11.8 t erreichen. Danach exportieren wir die Daten in einem geeigneten Format auf einen USB-Stick für das Terminal und die Düngung kann starten.
Wissenschaftler, Züchter, Agrochemieunternehmen und Landwirte nutzen Feldversuche seit langem um die Wirkung ausgesuchter Anbautechniken (z. B. Düngung, Sorten, Pflanzenschutz, Bodenbearbeitung) auf Pflanzen, Boden und Atmosphäre testen zu können [6]. Ein Feldversuch ist im Allgemeinen so gestaltet, dass er statistisch gesicherte Ergebnisse ermöglicht. Dazu sind Messungen, Zählungen und Bonituren nötig, die teilweise einen erheblichen personellen und technischen Aufwand bedeuten.
Fernerkundung und bildbasierte Techniken können dabei wesentliche Vorteile gegenüber manuellen Bewertungsverfahren bieten:
Quantitativ und qualitativ, maschinell ermittelte Daten reduzieren menschliche, individuelle Fehlerquellen und führen zu einer Objektivierung der Versuchsauswertung.
Bildbasierte Techniken und Softwarewerkzeuge ermöglichen einen hohen Grad an Automatisierung bei der Datenerfassung und -verarbeitung.
Drohnengestützte Fernerkundung kann im Vergleich zu manuellen Prozessen ein größeres Gebiet der Versuchswesens schneller und frequenter erfassen.
Die Fernerkundung kann das gesamte Gebiet einer Versuchsfläche messen, nicht nur die vom Feldarbeiter individuell ausgewählten Punkte.
Fernerkundungsdaten werden im Laufe der Zeit und unter verschiedenen Umweltbedingungen vergleichbar.
Drohnengestützte Fernerkundung kann dabei mehrere Aspekte der Phänotypisierung und botanischen Bewertung adressieren:
Flächenmessungen in multispektralen Orthomosaiken geben einen genauen quantitativen Überblick über Biomasse, indirekte N-Verteilung, Stressfaktoren oder Trockenmasse.
Photogrammetrische Techniken helfen bei der präzisen Berechnung der Wuchshöhe auf einem Feld oder einer Versuchsparzelle. Im Vergleich zu Laserscannern ist diese Lösung kosteneffizienter und bietet eine höhere Datenauflösung.
Statistische Mittelwerte und Standardabweichungswerte für Indexkarten und digitale Oberflächenmodelle lassen sich automatisch ermitteln.
Spezielle Indizes ermöglichen die Quantifizierung des Bedeckungsgrads der Parzellen.
Hochauflösende Orthomosaike ermöglichen eine präzise Zählung von Pflanzen oder sogar Blättern.
In einem zehnmonatigen Projekt hat Pix4D in Zusammenarbeit mit dem Institut für Agrar- und Stadtökologische Projekte an der Humboldt-Universität zu Berlin (IASP) wurden Methoden der Fernerkundung im Feldversuchswesen anhand typischer Mess- und Bonituraufgaben auf der Versuchsstation Berge in Brandenburg getestet und mit herkömmlichen Ansätzen verglichen.
Es geht hierbei weniger um die wissenschaftliche Auswertung konkreter Feldversuche als vielmehr um die Bewertung der technologischen Methodologie.
Technologische Grundlagen
Feldversuche
Wissenschaftliche Feldversuche dienen dem Ziel den Einfluss einer Anbautechnik auf Pflanzen, Boden und Atmosphäre vergleichend bewerten zu können. Biologische Systeme sind räumlichen und zeitlichen Schwankungen unterworfen. Die wissenschaftlich korrekte Durchführung eines Feldversuches muss deshalb immer auf die räumliche Variabilität landwirtschaftlicher Flächen eingehen. Dazu werden die zu vergleichenden Anbautechniken (Düngung, Sorte, Bodenbearbeitung etc.) parzellenweise variiert und wiederholt in einem Feldversuch angeordnet. Da sich die Untersuchungen auf den definierten Raum der Parzelle beziehen, ist ihre (Zentimeter-) genaue räumliche Abgrenzung wichtig. Die Bewertung der untersuchten Anbautechnik erfolgt auf Basis der gemessenen, gezählten und bonitierten Merkmale. Eine statistische Verrechnung ermöglicht es, signifikante Unterschiede festzustellen.
Seit jeher wird in Feldversuchen spezielle Versuchstechnik eingesetzt, da die hier gestellten Anforderungen oft andere sind als die in der sonstigen Landwirtschaft. Gleiches gilt für den Einsatz von Drohnen im Versuchswesen. Die Anforderungen an Drohnen im Versuchswesen unterscheiden sich insbesondere hinsichtlich der möglichen Auflösung und der erreichten Genauigkeit der georeferenzierten Positionierung. Die zu befliegenden Flächengrößen sind dagegen meist deutlich geringer als jene in der Landwirtschaft.
Drohnenbasierte Photogrammetrie
Die Beschreibung photogrammetrischer Methoden geht zurück auf die 1850er Jahre. Erste mechanische photogrammetrische Systeme sind seit Ende des 19. Jahrhunderts bekannt. Doch erst mit der Einführung leistungsstarker Computer ist es möglich, große Bilddatenmengen in angemessener Zeit zu verarbeiten. Softwarealgorithmen berechnen dabei über die Erkennung wiederkehrende Eigenschaften von Einzelaufnahmen einer Szenerie aus unterschiedlichen Blickpunkten 3D-Punktwolken, Orthomosaiken oder Vermaschungen (siehe auch [2]-[5]).
Obwohl photogrammetrische Methoden mit einer Vielzahl von unterschiedlichen Kameras und Sensoren möglich sind (Digitalkamera, Handykamera, Luftbildkamera im Flugzeug, Multispektralkamera, Rigsysteme, …), gelten unbemannte, preiswerte Luftfahrzeuge – Drohnen – als wesentlicher technologischer Impuls der rasanten Entwicklung der letzten Jahre. Drohnen wiederum wurden erst ermöglicht durch einen Durchbruch in der Batterie- und Motorentechnologie. Nur Lithium-Polymer-Batterien haben ein hinreichend kleines Gewicht, große Energiedichte und Leistungsabgabe, um Drohnen in der Luft zu halten. So bildet die Verfügbarkeit von Digitalkameras, leistungsstarken Prozessoren, preiswertem Speicher und Drohnen die technologischen Grundlagen für eine breite Anwendung der Photogrammetrie in der Vermessung, Bau, Bergbau, Landwirtschaft, Infrastrukturinspektion und vielem mehr. Der Zeitpunkt dieser Entwicklung lässt sich auf die Jahre 2010-2013 festlegen.
Zukünftig werden sich durch preiswerten, cloudbasierten, nahezu unbegrenzten Speicher und Rechenleistung weitere Anwendungsfelder ergeben. Machine-Learning basierte Klassifizierungsmethoden werden zu einem maschinellen Verständnis in digitalen Karten und 3D-Modelle führen und die Entwicklung entscheidungsunterstützender Systeme auch in der Landwirtschaft ermöglichen.
Multispektrale Bildanalyse
Wenn die von der Sonne ausgesandte elektromagnetische Strahlung auf die Erdoberfläche trifft, werden Teile der Strahlung reflektiert und anderer Teile absorbiert. Das Reflexionsvermögen ist eine charakteristische Eigenschaft, die genutzt werden kann, Materiale zu identifizieren und zu klassifizieren. Zum Beispiel absorbieren gesunde Pflanzen vor allem den roten und blauen Anteil des sichtbaren Lichtspektrums, da Chlorophyll diese Teile des Lichts in der Photosynthese als Energiequelle nutzt. Gleichzeitig reflektieren sie viel stärker den Nahinfrarotbereich.
Gestresste Pflanzen ändern ihre spektrale Reflexionssignatur. Sie reflektieren stärker den sichtbaren Bereich des Spektrums und weniger den Nahinfrarotbereich. Auch ist die Steigung im Übergang von niedrigen Werten im visuellen zu höheren Werten im Nahinfrarotbereich weniger steil. So haben Böden typischerweise ein flaches Spektrum ohne einen ausgeprägten Übergang zwischen visuellem Bereich und Nahinfrarot.
Multispektrale Bildanalyse umfasst die Messung von Multispektralsensordaten, die Erzeugung präziser Orthomosaiken für Reflektion und Indizes, sowie die agronomische und statistische Auswertung der digitalen Reflektions- und Indexkarten (siehe [1]).
Lidar
Lidar-Sensoren emittieren Laserstrahlen und erfassen die Reflektion des Lichts des untersuchten Objekt. Die Zeitdifferenz zwischen Laseremission und Sensormessung wird genutzt, um die Entfernung eines Bildpunkts zu bestimmen.
Bei UAV-basierten Lidar-Messungen für eine landwirtschaftliche Anbaufläche werden die Laserstrahlen von unterschiedlichen Ebenen des Bewuchses reflektiert. Das Sensorbild liefert eine 3D-Tiefenstruktur. Insbesondere bei Anwendungen in der Forstwirtschaft lassen sich so Art, Form und Anzahl der untersuchten Bäume einer Fläche bestimmen, sowie das unterliegende Höhenprofil.
Thermografie
Bei der Thermografie wird die Infrarotabstrahlung eines Objekts sensorisch bestimmt und als Temperatur des Objekts interpretiert.
Thermalsensoren können ebenfalls in Drohnen verbaut werden und mit z.B. dem Softwaretool Pix4Dmapper zu 3D-Modellen und Orthomosaiken verarbeitet werden.
Thermalsensoren können im Feldbau dazu dienen, Trockenstress zu erkennen.
Drohnen und Sensorik
Im Rahmen der Versuche kamen folgende Drohnen mit RGB- und Multispektral-Sensorik zum Einsatz:
Vergleich mit bisherigen Zähl-, Mess-, und Boniturmethoden
Neben Messungen und Zählungen werden Merkmale in Pflanzen bonitiert. Eine Bonitur ist eine fachgerechte, qualitative Beurteilung landwirtschaftlicher Betrachtungsobjekte. Im Feldversuchswesen werden Bonituren durchgeführt, um Parameter des Wachstums und der Entwicklung von Pflanzen aufnehmen zu können, die nicht oder nur mit großem Aufwand direkt gemessen oder gezählt werden können. Die Qualität der Bonitur ist abhängig von der Erfahrung und Fachkompetenz der Bonitierenden aber auch von der physischen (Sehvermögen) und mentalen (Müdigkeit) Verfassung. Für die Weiterverarbeitung der in einer Bonitur erzeugten Daten (z.B. statistische Verrechnung) werden meist vorab Boniturnoten definiert (z. B. 0 – 9), die dann, während der Bonitur entsprechend der Merkmalsausprägung vergeben werden.
Im Folgenden wird anhand von drei Feldversuchen exemplarisch gezeigt, wie Drohnen bei der Datenerfassung in Feldversuchen eingesetzt werden können. Insbesondere wird auf die Mess- und Boniturparameter
Allgemeiner Zustand der Parzellen (Z. b. Stand nach Winter, zeitliche Veränderungen im Pflanzenwachstum)
Pflanzenzählungen
Höhenmessung
Homogenität
eingegangen.
Pflanzenzählung bei Sonnenblumen Mai 2020 – Oktober 2020
Versuchsbeschreibung
Die Verteilung von Pflanzen auf einer Versuchsfläche ist wesentlich von der Verteilung des Saatgutes, dem Feldaufgang, und der nachfolgenden Beschädigung aufgelaufener Pflanzen durch Schaderreger abhängig. Grundsätzlich ist eine gleichmäßige Verteilung von Pflanzen vorteilhaft, die jeder Einzelpflanze einen definierten Standraum zuweist. Auf einem sandigen Boden der Versuchsstation Berge (Havelland) wurden Sonnenblumen in Reihenabständen von 75 cm angebaut. Die Zählung der Pflanzen erfolgte im Vier- bis Sechsblattstadium manuell auf definierten Streckenabschnitten der Reihenkultur. Dabei sollten nur die Kulturpflanzen und nicht etwaige Unkräuter berücksichtigt werden.
Zählung der Pflanzenanzahl
Das Sonnenblumenfeld wurde mit einer DJI Phantom 4 in einer Höhe von 7 m beflogen. Das Orthomosaik wurde mit Pix4Dfields erzeugt und hat eine Auflösung von 0,2 cm / Pixel. Die Schattierung resultiert aus wechselnder Bewölkung während der Befliegung. Mithilfe des Softwareprodukts Global Mapper wurde ein Bereich von 2 m x 2 m frei an verschiedenen Orten platziert, um die Anzahl von Pflanzen zu zählen und die Keimrate zu beurteilen.
Ergebnis: Mit Hilfe der Drohne gelang es, die Sonnenblumen-Pflanzen zu zählen und die Abstände der Pflanzen innerhalb einer Reihe zu erfassen. Nur in wenigen Fällen unterschieden sich die manuellen Zählungen von der Erfassung per Drohne. Wo zwei Pflanzen direkt nebeneinander standen erschienen diese bei der Zählung per Drohne als eine Pflanze. Außerdem wurden Unkräuter, die in der Drillreihe standen und in Form und Farbe der Sonnenblumen ähneln, als Sonnenblumen gezählt. Es ist deshalb davon auszugehen, dass die Genauigkeit der Zählung per Drohne sinkt, je mehr Pflanzen in sehr geringem Abstand voneinander stehen und je mehr störende Strukturelemente Elemente (Unkraut, Steine) vorhanden sind. Dem kann mit einem erhöhten Aufwand bei der Befliegung und Nachbearbeitung begegnet werden.
Bonitur des allgemeinen Zustandes von Parzellen im Winterroggen Oktober 2019 – Juni 2020
Versuchsbeschreibung
Um die Wirkung diverser Biogas-Gärreste auf den Boden und auf das Pflanzenwachstum zu bestimmen, wurde 2011 ein Feldversuch mit einer Grünroggen-Silomais-
Grünroggen-Sorghumhirse Fruchtfolge angelegt. Seitdem werden regelmäßig Parameter des Wachstums und der Entwicklung aufgenommen. Zu den regelmäßigen Bonituren gehört auch die visuelle Inaugenscheinnahme, um den Wachstums- und Entwicklungsfortschritt der Pflanzen sowie Unregelmäßigkeiten in den Parzellen bewerten zu können. Die Bonitur des allgemeinen Zustandes der Parzellen dient auch der Qualitätskontrolle von Versuchen. Im Folgenden wird dargestellt, wie diese Aufgabe mit Hilfe einer Drohne erledigt werden konnte.
Zeitlicher Vergleich des Pflanzenwachstums
Der Versuch zum Winterroggen vom 31.3.2020 und vom 21.4.2020 wurde visuell verglichen. Die Bilder wurden mit einer DJI Phantom P4 ohne RTK aufgenommen und mit Pix4Dmapper verarbeitet. Die Georeferenzierung erfolgte mit QGIS über die Zuordnung charakteristischer Geländepunkte.
Die Befliegungen ließen sich bei guten Witterungsbedingungen durchführen. Starker Wind ab ca. 35 km/h führte in unseren Versuchen dazu, dass die Einzelbilder der Parzellen sich so stark voneinander unterschieden, dass diese nicht mehr zu einem Orthomosaik zusammengefügt werden konnten.
Ergebnis: Auf den mit der Drohne produzierten Bildern sind Unregelmäßigkeiten (Stellen mit geringer Anzahl Pflanzen) in den Parzellen gut zu erkennen. Der Wachstums- und Entwicklungsfortschritt lässt sich ebenfalls ausreichend genau abschätzen. Die regelmäßige manuelle Inaugenscheinnahme der Parzellen lässt sich durch den Einsatz der Drohne grundsätzlich ersetzen. Ein Vorteil der Drohne ist dabei die Draufsicht, bei der sich Lücken auch in der Mitte einer Parzelle gut erkennen lassen während der Betrachter vor Ort die Pflanzen nur in einem bestimmten Winkel sieht. Insbesondere bei hohen Pflanzen ergibt sich hier ein Vorteil.
Messung der Pflanzenhöhe und Biomasse von Roggen
Das Versuch mit Winterroggen wurde mit einer DJI Phantom 4 am 21.4.2020 in einer Höhe von 15 m beflogen. Mithilfe von Pix4Dcloud wurde das digitale Höhenmodell (DSM) berechnet und anschließend in Global Mapper importiert. Dort wurden die zu untersuchenden Parzellen ausgeschnitten und die Histogramme erstellt. Die Histogramme können in verschiedenen Auflösungen berechnet und exportiert werden. In z.B. Microsoft Excel lassen sich dann Mittelwerte und Standardabweichungen berechnen. Die Wuchshöhen dicht beieinander liegender Parzellen können quantitativ verglichen werden.
Ergebnis: Die Datenerhebung und Berechnung sind vergleichsweise einfach. Es wird keine spezielle (und teure) Lidarsensorik benötigt. Einfache Kameradrohnen liefern bereits gute Resultate in hoher Datendichte. Anders jedoch als bei Lidarmessungen werden bei der photogrammetrischen Messung nur die sichtbaren Punkte verarbeitet. Ist der Boden nicht sichtbar, fehlt die Referenzhöhe für die Wuchshöhenmessung, was insbesondere problematisch ist, wenn das Terrain des Versuchs uneben oder abschüssig ist. Hier können digitale Oberflächemodelle helfen, die ohne Bewuchs erfasst und berechnet wurden. Wenn z. B. bei der Aussaat der Parzellen ein RTK-Lenksystem eingesetzt wird, ist eine ausreichend genaue Aufzeichnung der Höhe der Antenne über NN möglich. Die so erzeugte Höhenkarte kann als Basis für die Höhenberechnung einzelner Parzellen verwendet werden. Die Differenz der Höhenmodelle liefert die absolute Pflanzenhöhe. Gegebenenfalls müssen zusätzlich Fehler der vertikalen GNSS-Messung korrigiert werden.
Über Volumenmessungen lässt sich die Biomasse der Parzellen qualitativ abschätzen.
Bedeckungsgrad
Auf einem multispektralen Orthomosaik wird ein NDVI-Index in Pix4Dfields berechnet. Ein Teil des Spektrums, der charakteristisch für Boden ist, wird maskiert. Eine Analyse der Histogramme der einzelnen Parzellen (wie schon oben beschrieben) lässt Rückschlüsse auf den Bedeckungsgrad des Versuchs zu.
Ergebnis: Bislang wird der Bedeckungsgrad von Parzellen meist in einer zeitaufwändigen Bonitur festgestellt. Aus RGB-Bildern und aus multispektralen Sensordaten lassen sich relativ einfach qualitative Aussagen zum Bedeckungsgrad einer Kultur gewinnen. Die Auswahl des Index sowie die Eingrenzung der Histogrammwerte sind von Fall zu Fall unterschiedlich, können aber recht einfach interaktiv gefunden werden. Die Maskierung des Bodens kann auch verwendet werden, um Indexmessungen sowie statistische Messungen auf den Bewuchs einzuschränken.
Indexmessungen
Es soll untersucht werden, ob die Biomasse der einzelnen Parzellen und deren zeitliche Veränderungen mit multispektralen Messmethoden quantifiziert werden können.
Das NDVI wurde mithilfe einer Parrot Bluegrass und einer Sequoia Multispektralkamera aufgenommen. Das NDVI wurde mit Pix4Dfields berechnet. Georeferenzierung und Nachbearbeitung erfolgte mit Global Mapper. Die NDVIs zeigen eine leichte Grünverschiebung entsprechend der Versuchentwicklung über einen Monat. Die Histogrammverteilungen korrelieren mit den visuell sichtbaren Unterschieden der Parzellen und können als csv-Dateien für die statistische Auswertung exportiert werden.
Ergebnis: Die Histogrammdaten korrelieren mit dem sichtbaren Wachstumsfortschritt der Parzellen. Die Standardabweichungen der Verteilungen beschreiben gut die Homogenität der Parzellen. Die Verarbeitung der Daten erfordert allerdings viele wiederkehrende Softwarearbeitsschritte. Hier wäre ein höherer Grad der Automatisierung wünschenswert.
Hirse Mai 2020 – Oktober 2020
Versuchsbeschreibung
Im zuvor beschriebenen Versuch mit Winterroggen wurde nach der Ernte im Mai 2020 Sorghumhirse angebaut. Wachstum und Entwicklung sind im Versuch durch differenzierte organische und mineralische Düngung beeinflusst.
Höhenmessung
Die photogrammetrische Höhenmessung im Hirseversuch gestaltete sich schwieriger als im Roggenversuch. Die Pflanzen stehen in größeren Abständen. Die Pflanzen sind sehr verschieden groß. Die Größenverteilung ist inhomogen.
Zur möglichst umfassenden Bestimmung dieser Eigenschaften wurde die Versuchsfläche in einer Höhe von 10m mit einer DJI Phantom 4 beflogen, um eine besonders hohe Datenauflösung zu erzielen. Die Eingangsbilder mit einer niedrigen Subzentimerter-GSD (Ground Sampling Distance) wurden in Pix4Dmapper verarbeitet, um eine 3D Punktwolke und ein digitales Höhenmodell zu berechnen.
Ergebnis: Erfolgt die Datenerhebung mit einer zu großen GSD, d.h. in einer zu großen Flughöhe, kann das digitale Höhenmodell des Versuchs nicht hinreichend genau berechnet werden. Einzelne Merkmale der Pflanzen werden nicht erfasst und Messungen in der Punktwolke sind nicht möglich.
Kompatibilität zu bestehender Feldversuchstechnik
Bei Verwendung einer Drohne im Versuchswesen stellt sich die Frage, wie sich diese Technik in vorhandene Versuchstechnik integrieren lässt. Auf vielen Versuchsstationen sind inzwischen RTK-Lenksysteme und spezielle Software zur Erstellung von Parzellenplänen verfügbar. Insbesondere die Aussaat und die Düngung wird meist auf Basis, der auf der Versuchsfläche erzeugten oder vorab definieren AB-Linien durchgeführt. Diese Linien oder auch shp-Dateien aus der Software zur Erstellung des Parzellenplans lassen sich auch für die Drohne nutzen. Zu beachten ist dabei, dass RTK-fähige Drohnen das Korrektursignal von einem Server beziehen und Versuchsstationen oftmals eigene Referenzstationen nutzen, die per Funk mit den Fahrzeugen verbunden ist. Um eine hohe Genauigkeit zu erreichen, empfiehlt es sich daher, für alle Nutzer des Korrektursignales eine einheitliche Quelle zu verwenden.
Fazit
Drohnenbasiertes Remotesensing führt zu einer Objektivierung der Messergebnisse bei bestimmten Boniturmethoden. Preiswerte Drohnenmodelle und Sensorik ab ca. 700 EUR liefern bereits sehr gute Daten zur Analyse der Pflanzenanzahl, Bedeckungsgrad, Höhe und Homogenität. Drohnenmodelle ab ca. 5.000 EUR ermöglichen durch die Verwendung von RTK zentimetergenaue Messungen und damit zeitliche Vergleichbarkeit der Daten ohne zusätzlichen Aufwand zur Georeferenzierung. Multispektralsensorik erlaubt in dieser Preisklasse qualitative Messungen der Biomasse und Stressfaktoren.
Die Datenauswertung erfolgt manuell interaktiv, ist zeitaufwendig und erfordert aktuell die Verwendung unterschiedlicher Softwaretools. Der Austausch der teilweise sehr umfangreichen Daten zwischen den Tools ist dabei teils aufwendig. Automatisierte Auswertungsschritte sind nur ansatzweise verfügbar.
Beide Aspekte sollten zukünftig verbessert werden, um eine höhere Akzeptanz der Technologie im Feldversuchswesen zu erreichen.
[2] M. Cubero-Castan, K. Schneider-Zapp, M. Bellomo, D. Shi, M. Rehak, and C. Strecha: Assessment of the radiometric accuracy in a targetless workflow using Pix4D Software, 9th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), 2018.
[4] J. Vautherin, S. Rutishauser, K. Schneider-Zapp, H.F. Choi., V. Chovancova, A. Glass, and C. Strecha: Photogrammetric Accuracy and Modeling of Rolling Shutter Cameras. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences 3, 139-146, 2016
[5] C. Strecha, R. Zoller, S. Rutishauser, B. Brot, K. Schneider-Zapp, V. Chovancova, M. Krull, and L. Glassey: Quality assessment of 3D reconstruction using fisheye and perspective sensors. ISPRS Annals of Photogrammetry, Remote Sensing, and Spatial Information Sciences 2, 215-222, 2015.
[6] E. Möller-Arnold & E. Feichtinger: Der Feldversuch in der Praxis. Verlag von Julius Springer, Wien, 1929.
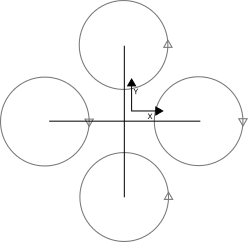
The project objective was to build a self-stabilizing, flying quadrocopter that can be controlled remotely by a mobile phone, PC or joystick.
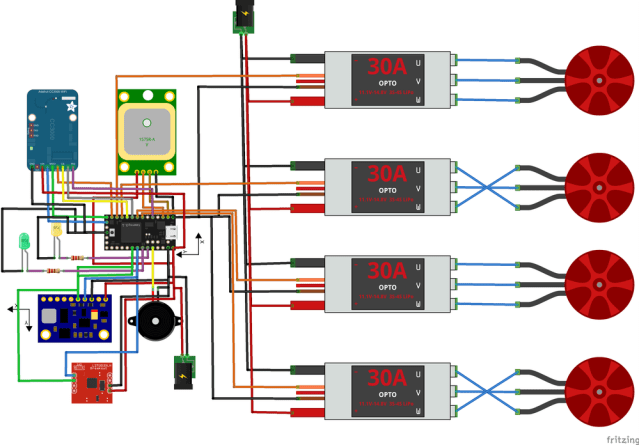
Components and wiring
In addition to the Teensy3.1, CC3000, 10DOF (L3G4200D, ADXL345, HMC5883L, BMP085) we have also a Ublox NEO-6M for GPS, 2 control LEDs and a Piezo beeper for status messaging.
You may ask why we use in addition to the HMC5883L a second electronic compass (LSM303DLH). The reason is that the electronic compass on the main board is extremely sensible to the magnetic environment coming from the WiFi and ESC. I found a better place below the battery but that required to add the additional module. Also, the compass is very sensible to the vibrations from the motor. I used the same approach as with the tilt, to combine the compass measurement with the gyro with quite good results and low standard deviation in the measurement. Here a few downloads to see the layout in Fritzing:
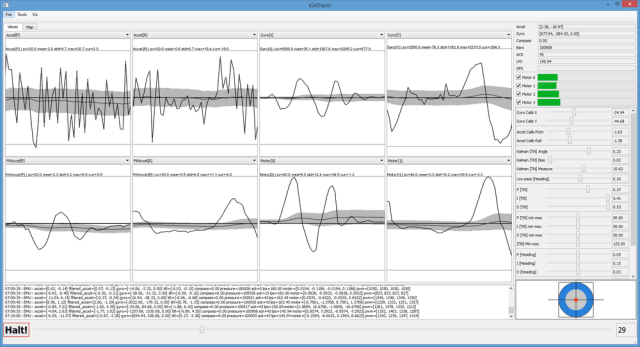
ops per seconds improved and Gyro/Accelerometer calculation changed. ESC delay measured. Seems to be around 70msec.
Delay between PWM input (red) and rotation time measurement (green), less than 100msec minus 30msec for 1 rotation = less than 70msec. The final copter main loop runs at around 130Hz – what turned out to be fast enough. However there seems to be some optimization potential, e.g. by using a multi-threaded microkernel stack to avoid blocking response times in the different protocol requests to the sensors or to use optimized floating point calculations, e.g. by fixed-fraction integer arithmetic.
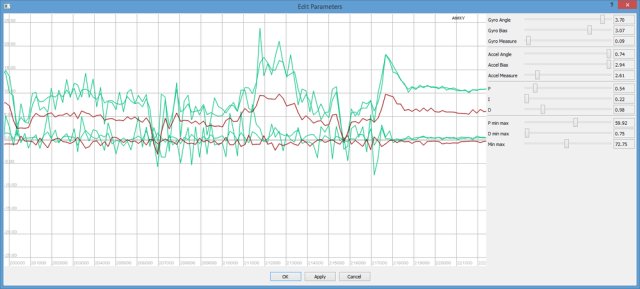
Intel Galileo turned out to be very unstable in the PWM control, complete redesign with Teensy 3.1 and Adfruit CC3000 for WiFi control, works fine so far. A new Qt based GUI has been implemented to allow fine tuning of filters and PID parameters.