The project objective is to build different types of high flying solid fuel rockets.



The project objective is to build different types of high flying solid fuel rockets.
Die Idee zu diesem Projekt ist schon ein wenig älter. Noch vor Baumgartner’s Sprung aus der Stratosphäre gab es die Idee, ein Video eines Falls aus sehr großer Höhe hinunter zur Erdoberfläche zu filmen. Nach einiger Recherche war klar, dass das Projekt machbar ist und die Dinge, die man benötigt, zu kaufen sind bzw. gebaut werden können. Es konnte also losgehen.
Im Detail sollte ein Wetterballon eine Kapsel auf über 30km bringen, nach Platzen des Ballons sollte die Kapsel frei fallen und erst in Höhe von 2-3km den Fallschirm auslösen und sicher landen.
Die Position sollte über SMS an ein Handy gemeldet werden, so dass die Kapsel und das Bildmaterial geborgen werden konnte.
Als erstes haben wir einen Fallschirm genäht und getestet, was technisch kein größeres Problem darstellt – ca. 1,20m im Durchmesser und groß genug, um eine Masse bis ca. 1,5kg im Fall abzubremsen.
Die Bilder sollten über ein Smartphone gemacht werden, dass auch die Steuerlogik ausführen sollte. Zur Anwendung kam ein Samsung S2 mit seiner recht guten 8MP Kamera. Schnell stellte sich heraus, dass die Sensorik ergänzt werden musste, sowie die Ansteuerung des Auslösemechanismus etwas mehr Elektronik erforderte. Dazu wurde ein Arduino hinzugefügt, der den Luftdruck, Temperatur und Beschleunigung messen und über eine Motorsteuerung Relais zum Auslösen des Fallschirms ansteuern sollte. Die Kommunikation sollte über Bluetooth erfolgen erfolgen. 2 Shields haben wir dazu designed und später zusammengelötet.
Das Konzept wurde auch so umgesetzt. Die Software kann man sich hier ansehen.
Schwierig erwies sich, eine möglichst lange Batterielaufzeit zu erzielen. Beim Smartphone konsumiert der Bildschirm die meiste Energie. Das Programm wurde so geschrieben, dass es immer nur bei der Foto- und Videoaufnahme den Bildschirm anschaltet, was alles in allem zu Laufzeiten bis zu 12h ohne zusätzliche externe Energieversorgung führte.
Die Bluetooth-Kommunikation war ebenfalls nicht ganz trivial, da das verwendete, übliche Chinesische HC-05 oder HC-06 Modul, wie man es z.B. bei ebay hier bekommen kann, in verschiedenen Firmware-Versionen existiert und die Einstellung der Baudraten etc. doch erhebliches Rätselraten und viel Testzeit beansprucht hat. Die gefundene Konfiguration und Kommunikation erwiesen sich dann jedoch als außerordentlich stabil.
2 Relais sollten den Deckel für den Fallschirm öffnen, dazu wurde eine Motorsteuerung TB6612FNG eingebaut. Es stellte sich heraus, dass die Relais eine recht hohe Stromaufnahme haben, was nach mehrstündigen Flug in sehr kalter Umgebung ein Problem für die Batterien darstellen kann. Nur gut ist, dass wir diesen Teil des Experiments doch in letzter Minute noch herausgenommen und vereinfacht haben.
Die Software ist im wesentlichen eine Zustandsmaschine, bei der die Zustände, z.B. Aufstieg, Fall, Fallschirmflug durch diverse Änderungen, wie etwa bestimmte Luftdruckwerte, große Beschleunigung oder Zeitschranken ausgelöst werden.
Als Wetterballon haben wir einen Pawan CPR 1200 bei ebay gekauft, der nach Herstellerangaben bis zu 1kg auf über 30km bringen kann. Der Ballon wurde mit Helium gefüllt, dass wir in einer Stahlflasche bei der Peter Lindner GmbH in Pankow erworben haben. Vielen Dank insbesondere für das Ausleihen der Füllventile.
Kurz vor Start ergab sich durch den Sponsor HERE noch die Möglichkeit, eine GoPro als zweite Kamera einzubauen.
Als Redundanz-Ortungssystem wurde noch ein zusätzlicher GSM/GPS-Tracker eingebaut, wie man ihn z.B. hier bei ebay kaufen kann.
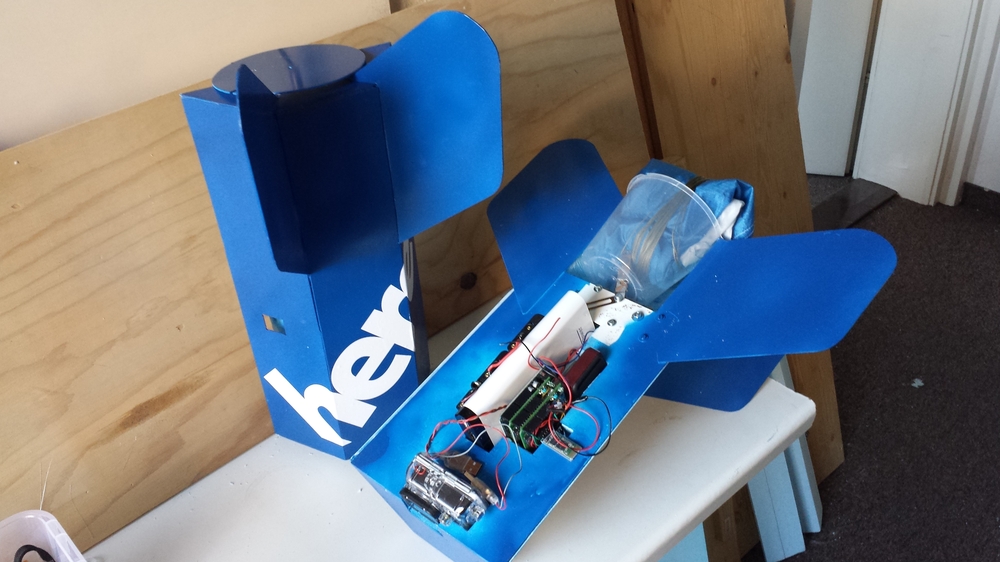
Die ganze Teile wurden in einen Styroporblock eingebaut.
Zusätzlich kamen noch Zehenwärmer aus dem Outdoor-Laden hinein, um für ein wenig Wärme bei -50°C Außentemperatur zu sorgen.




Die Deutsche Flugsicherung benötigt für einen Starterlaubnis eine Haftpflichtversicherung, die wir von der Allianz bekommen haben, eine Experimentbeschreibung und eine Bestätigung für den Startplatz. Den Startplatz wählten wir möglichst weit entfernt von großen Wasserflächen, dass der Ballon bis zu 150km abdriften kann. Berlin und Brandenburg kamen dann doch nicht in Frage. Das Stettiner Haff und die Mecklenburger Gewässer sind so weit nicht entfernt und einen Totalverlust wollten wir auf die Art nicht riskieren. Wir haben dann bei der Familie Brodauf in Lichtenberg im Erzgebirge eine Wiese als perfekten Startplatz bekommen, wofür ich mich an dieser Stelle noch einmal herzlich bedanken möchte.
Die Flugsicherung München gab dann auch für den 21.12.2013 10:00 Uhr bis 14:00 Uhr eine Warnung für den Aufstieg unseres Wetterballons heraus.
Für mich, der im Osten Deutschlands mit all den Kontrollen und Reglementierungen aufgewachsen ist, erscheint es immer noch als Wunder, dass man so ohne weiteres die Genehmigung für ein Experiment dieser Art mit Luftbildaufnahmen und Einfluss auf den Luftverkehr erhalten kann.
Wenige Tage vor Start war alles zur Integration fertig. Leider stellte sich heraus, dass mit Handy, GoPro, Arduino, GSM/GPS-Modul, Batterie und Kapsel mit Logo-Print die Kapsel zu schwer war. Wir haben dann Flügel, die ursprünglich große Batterie und die Relais entfernt, was zu einem reduzierten Gesamtgewicht von ca. 1,4kg führte. Immer noch mehr als geplant, aber mit ein wenig mehr Helium im Ballon noch im Bereich der Durchführbarkeit. Die elektronische Auslösung des Fallschirms wurde also in letzter Minute herausgenommen, stattdessen sollte des Fallschirm durch einen kleineren Vorfallschirm bei entsprechender Luftdichte mechanisch ausgelöst werden – KISS-Prinzip, keep it simple, stupid.
Allerdings beschränkte sich durch diese Änderung auch der freie Fall auf die oberen dünnen Luftschichten.
Das Wetter am 21.12. war außerordentlich gut für Ende Dezember. Ein paar Wolken, aber auch sonnige Abschnitte, um die 2° C.
Wir hatten geschätzt, dass der Fülldurchmesser des Ballons mit etwas Übergewicht für die Nutzlast ca. 2,10m betragen sollte. Die Angaben zum Ballon, die wir finden konnten, waren nicht ganz eindeutig, so blieb es bei einer Schätzung zum Füllvolumen. Ein späteres Nachmessen des Gasflaschendrucks hat ergeben, dass der Ballon mit 5qm Helium befüllt wurde.
Die technische Startvorbrereitung und das Befüllen des Ballons verliefen sehr gut. Pünktlich um 10:00 startete der Ballon.
Dann hieß es erstmal abzuwarten.
Nach ca. 1h und 45min meldete sich die Kapsel mit einer SMS mit einer Positionsangabe.
Die Position lag ca. 70km vom Startplatz entfernt in einem Waldgebiet ca. 300m von der nächsten Siedlung entfernt im tschechischen Teil des Erzgebirges, ca. 2h Autofahrt vom Startpunkt entfernt.
Die Position war auf den Meter genau, nur die Bergung gelang am ersten Tag nicht. Die Kapsel lag auf einer ca. 30m hohen Kiefer. Unverrichteter Dinge ging es zurück.
Die Batterien in der Kapsel reichten noch für SMS-Meldungen bis in die Abendstunden für insgesamt mehr als 11 Stunden.
Die Bergung der Kapsel gelang dann an einem der kommenden Tage.





Time,Latitude, Longitude, Altitude
9:38:15AM, 50.838585, 13.382951, 478.90
10:04:52AM, 50.839, 13.395, 964.10
10:06:35AM, 50.842, 13.415, 1526.90
10:06:52AM, 50.845, 13.42, 1612.50
10:08:52AM, 50.846, 13.425, 2237.00
10:10:52AM, 50.847, 13.445, 2784.20
10:11:36AM, 50.848, 13.46, 2980.70
10:12:53AM, 50.849, 13.48, 3392.00
11:16:34AM, 50.801, 14.40, 3891.70
11:16:57AM, 50.802, 14.41, 3412.00
11:17:37AM, 50.803, 14.42, 2616.40
11:18:46AM, 50.804, 14.425, 1279.00
11:21:16AM, 50.805084, 14.429254, 435.30
GPS misst zwar auch die Höhe, jedoch lieferte unser Handy oberhalb von 3991m keine Ergebnisse. Auch wenn dieser Wert unterhalb des US Export Limits von 18.000m liegt, vermute ich, dass die Beschränkung denselben Grund hat. So bleibt nur die Höhenbestimmung über den Luftdruck.
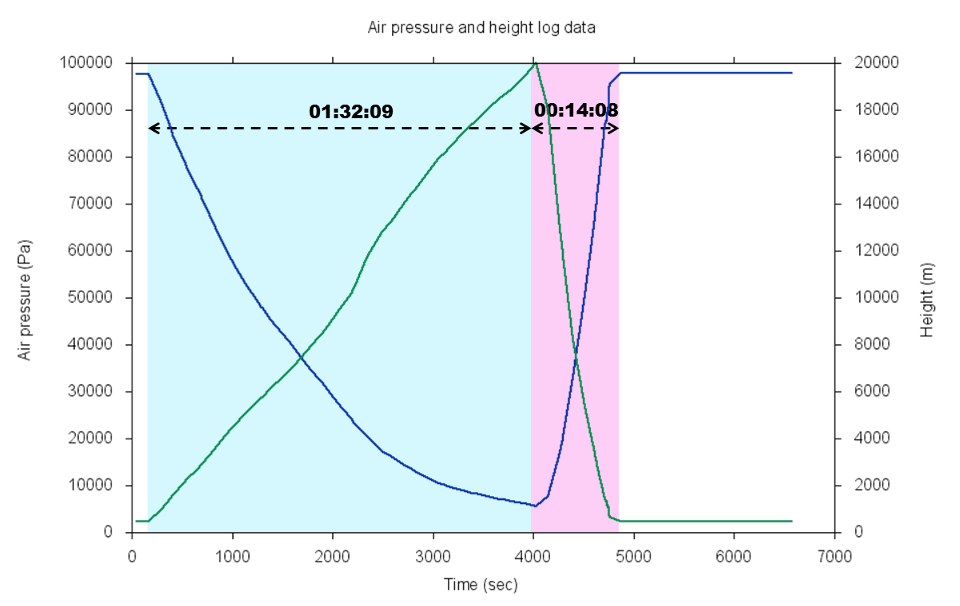
Das folgende Diagramm zeigt den gemessenen Luftdruck und die entsprechende über das ISA-Standard-Atmosphärenmodell (vgl. z.B. hier) berechnete Höhe.
Als weiterer Fehlerwert schleicht sich ein, dass der BMP085 Luftdruck-Sensor entsprechend Datenblatt eigentlich nur im Messbereich >300hPA korrekt arbeitet.
Die per GPS gemessene Starthöhe betrug 478m, die Höhe des Fundorts 435m. Die barometrisch ermittelten Höhen weichen davon um 100m ab, was im Diagramm korrigiert ist.
20.000m Höhe haben wir etwa erreicht. Die angepeilten 30.000m wurde auf Grund des zu hohen Startgewichts und gewählten größeren Ballonstartvolumens verfehlt. Dennoch ein außerordentlich gutes Ergebnis!
… sollte
Based on the idea to create a video from a space dive the team around IG4D started to kickoff this project, even before the famous “Baumgartner jump”. Investigations showed quite quickly, we can make it. Most of the stuff we needed could be either bought or manufactured, so let’s go. The plan sounded easy – use a weather balloon to lift up a transport capsule to 100,000ft (30km). At this level the outbound pressure is close to zero, so the balloon will explode and fall down. At 7,000-10,000ft (2-3km) a parachute will open and help to land safety. In order to find the capsule after landing easily, we used a smartphone and it’s inbuilt positioning system to send an SMS of the current position once available.
We started creating a parachute with a diameter of around 4ft (1.2m), capable of throttling a 3lbs (1.5kg) heavy transport shell. For the control unit we used a typical smartphone, a Samsung S2 in our case. This device is balance well between battery lifetime, camera quality (8MP) and weight. It turned out we needed some more sensors in order to operate reliably in space. Therefore we added an Arduino module capable of measuring air pressure, temperature and acceleration. The idea was, that once parameter tell the time is right, the Arduino will activate a motor controlled relays which then will open the parachute. Bluetooth network was the favorite choice to realize the communication between the systems. You will find the software listing here.
Battery life is really critical for every autonomous entity, no exception to our project. As the device display usually consumes most of the energy, we wrote the software in a way to only power the screens once we taking pictures. This leads to a 12hour lifetime without any extra battery pack. If you try to build with affordable components as we did, be aware of sometimes awkward issues. We used a typical Bluetooth communication module HC-05 / HC-06 from a Chinese manufacture, such as this one. It is shipped with various firmware versions, all slightly different. Finding out the right settings, e.g. baud rate, is a nice and mind-cracking way of wasting time. Finally we found a set of parameters which turned out to work very reliably. All of the flight control related input was gathered and processed within the smartphone controller app. Air pressure and acceleration data together with time information were mapped into certain flight phases, such as rise and fall. As said before, we planned to open the parachute using 2 relays. Therefore we tried to use a TB6612FNG motor control. We realized in the very last minute, that this configuration demanded a lot of power, which is a serious issue for batteries flying several hours in a sub zero °C environment. Finally we simplified the parachute opening mechanism to the bare minimum. In order to get our shell into space we bought a Pawan CPR 1200 weather balloon from ebay, which is guaranteeing to lift a 2lbs entity up to 100,000ft (30km). We filled the balloon with Helium. We lent a steal cylinder full of it from a local company. Thanks to Peter Lindner GmbH for sharing the valves. From our main sponsor HERE we were provided with an additional GoPro outdoor camera. Furthermore we integrated a redundant GPS / GSM positioning system, such as this one from ebay. Everything was covered by block of Styrofoam. In order to keep the battery and device temperature above zero we put additional heat packs into the block. You can get them from almost every outdoor shop, like this one here.
For every airborne vehicle you wanna start in Germany you need an approval from the German Air Navigation Services (DFS Deutsche Flugsicherung GmbH). This approval is only granted, if you have a third party insurance for aircraft and similar items (we got from the Allianz Insurance Company), a short description of your project and a written approval for a dedicated and non-public take-off site (usually greens and fields are acceptable). We decided to go for an area, which has no major sea or lake in a proximity of around 90mi (150km), which is the usual moving distance for an experiment like ours. Due to the Baltic Sea and the large lakes in Mecklenburg being close, Berlin and Brandenburg wouldn’t be a good choice. Instead we found some good take-off site in the Erzgebirge area with a nice village called Lichtenberg. Thanks again to Family Brodauf for the provisioning of their grassland. Finally we got green from the Air Navigation Services in Munich, giving us a time frame ranging from 10AM (10:00) to 2PM (14:00) at the 21th of December 2013. Looking back, also considering memories from former GDR times, it was relatively easy to get all the related approvals. We should never forget, we entered public air space with all the possible security threats.
We finished all preparations a few days before the 21th, however we realized due to the additional equipment, especially the GoPro cam, the shell was too heavy. So we removed the stabilization wings, the oversize battery and the relays ending up in overall 3lbs (1.4kg) weight. Still more than the initially planned 2lbs (1kg), but we had the hope to compensate that with an extra fill of Helium. The previously planned opening mechanism for the parachute was replaced by the addition of a smaller secondary parachute, which would open once the falling shell would leave the stratosphere – KISS, keep it simple, stupid. As a result of that change we expected the free fall phase would be shorter.
Weather conditions were astonishing at this 21th of December for this mountainous Saxony region. Sunny sky, partially clouded at a nice 35°F (2°C).
We estimated the filled balloon should have a 7ft (2,1m) diameter, which was a little vague guess due to fill instruction from the balloon vendor. We used a total of 177ft³ (5m³). All the final work, including the balloon filling and last tests of the equipment were finished at 10AM (10:00) leading to a smooth lift off. After a little more than a minute or two the balloon was already out of sight. Means for us sit and wait.
A quarter to noon (11:45) we got a first proof of live via an SMS position message. After a quick map look-up we realized it was a village in the Czech Republic, around 40mi (70km) far from our current position (air distance). It took around 2hours to get there by car, but fortunately the position was highly accurate. As the capsule finished it’s fall in the crown of a 100ft (30m) tall pine tree capture was impossible. So we came back a few days later with proper equipment. We received SMS positioning messages for more than 11 hours till the night.
Time,Latitude, Longitude, Altitude
9:38:15AM, 50.838585, 13.382951, 478.90
10:04:52AM, 50.839, 13.395, 964.10
10:06:35AM, 50.842, 13.415, 1526.90
10:06:52AM, 50.845, 13.42, 1612.50
10:08:52AM, 50.846, 13.425, 2237.00
10:10:52AM, 50.847, 13.445, 2784.20
10:11:36AM, 50.848, 13.46, 2980.70
10:12:53AM, 50.849, 13.48, 3392.00
11:16:34AM, 50.801, 14.40, 3891.70
11:16:57AM, 50.802, 14.41, 3412.00
11:17:37AM, 50.803, 14.42, 2616.40
11:18:46AM, 50.804, 14.425, 1279.00
11:21:16AM, 50.805084, 14.429254, 435.30
Even though GPS retrieves altitude information, above around 12,000ft (3991m) no valid values will be delivered by Smartphone inbuilt sensor. This is way below the official US Export Limits of 55,000ft (18.000m), yet we guess this limitation may also be related. Hence we used air pressure based altitude calculation.
The chart below illustrates the ratio between air pressure and altitude, based on the International Standard Atmosphere (ISA) model. It is important to keep in mind, that the used air pressure sensor BMP085 is only working reliably in environments >4.35psi (300hPa).
The altitude of the take-off site measured by GPS was 1500ft (478m), the one of the landing zone was 1400ft (435m). The values measured by the air pressure sensor were 300ft (100m) off, which is already corrected in the chart.
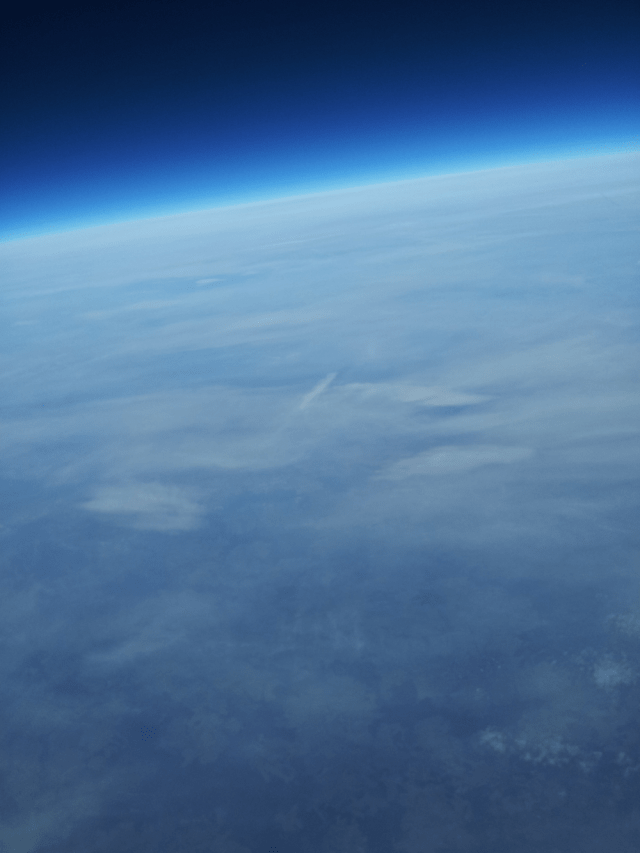
Based on the air pressure profile we have finally reached a maximum altitude of around 65,000ft (20km). Even though we missed our 100,000ft (30km) target level due to the extra weight we would call it a success, especially if look at this awesome set of pictures from the space.
…we aiming for
