Insektenschutz ist ein wichtiges Thema, das uns alle angeht. Es gilt, Lebensräume von Insekten zu erhalten, Lichtverschmutzung zu reduzieren und den Einsatz von insektengefährdenden Chemikalien in die Umwelt zu reduzieren.
Verschiedene Gesetze und Verordnungen wurden dazu verabschiedet, z.B. die Düngeverordnung oder das Insektenschutzgesetz.
Insektenschutz ist vorrangig natürlich kein juristisches Problem sondern vor allem eine praktische Frage.
Wie kann man Insektenschutz in der Praxis umsetzen?
Wie können Drohnen und Fernerkundung beim Insektenschutz helfen?
Technik
Was benötigt man dazu? Der größte Kostenfaktor ist sicher die Technik für teilflächenspezifische Anwendungen, d.h. eine Feldspritze mit Jobrechner, besser noch mit Teilbreitenschaltung und Einzeldüsensteuerung.
Preiswerte Fotodrohnen um die 700 EUR aus dem Elektronikmarkt, zum Beispiel die Parrot Anafi oder die DJI Phantom 4 eignen sich gut für den Einstieg. Die Software, die wir hier vorstellen möchten, ist ab ca 130 EUR pro Monat erhältlich.
Karten und Genauigkeit
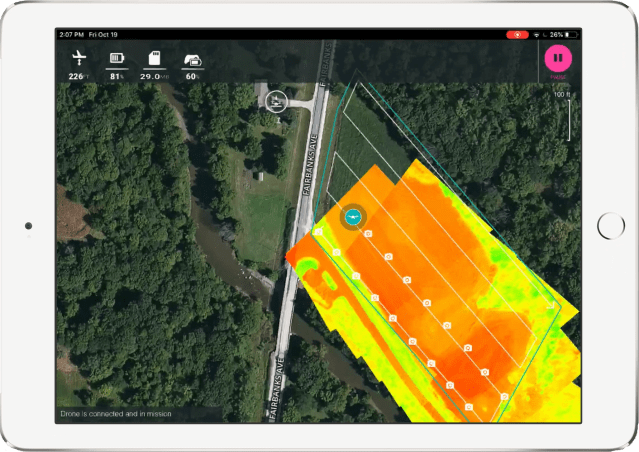
Herangehensweise und Arbeitsschritte wollen wir anhand eine konkreten Datensatzes eines Weizenfeldes in der Nähe von Prötzen in Brandenburg erläutern. Das Feld wurde in 100 m Höhe mit einer Drohne und einer Multispektralkamera beflogen.
RGB Orthomosaik mit Feldbegrenzung
Die sogenannten Orthomosaiken und Indexkarten wurden aus den Luftbildaufnahmen mit Pix4Dfields errechnet.
Die Genauigkeit hängt davon ab, wie die Luftbildaufnahmen aufgezeichnet wurden. Standard GNSS-Systemen (meist wird eine Kombination aus GPS, Glonass, Galileo und Beidou verwendet) ermöglichen Genauigkeiten in der Praxis von 0,5 m bis 3 m. Genauigkeiten von bis zu 1-2 cm lassen sich erreichen zum einen, indem Störungen des GNSS-Signals durch ein RTK-Signal korrigiert werden. RTK-Drohnen sind deutlich teurer als Drohnen ohne RTK-Unterstützung, jedoch ermöglichen sie ein problemloses Zusammenspiel in bezug auf die Genauigkeit zwischen Traktorlenksystemen und Anwendungskarten, die über Drohnenfernerkundung gewonnen werden.
Die zweite Möglichkeit ist eine Positionskorrektur der Karten mithilfe von Bodenkontrollpunkten oder GIS-Werkzeugen, die in einem weiteren Beitrag dieses Blogs beschrieben werden.
Zwei Sachen fallen in unserem Weizenfeld auf: Erstens ist der Pflanzenwuchs deutlich inhomogen. Und zweitens gibt es hier ehemalige Tümpel, die auf früheren Satellitenbildern noch als Wasserflächen zu erkennen sind. Sie sind wahrscheinlich klimawandelbedingt ausgetrocknet, wie auch an vielen anderen Orten in Brandenburg zu beobachten ist. Dennoch, diese Stellen und auch die Wegesränder sind wichtige Insektenlebensräume, die wir mit 10 m breitem Abstand zu unseren Feldanwendungen schützen wollen.
In einem ersten Schritt werden wir dazu im Orthomosaik den Bereich des Feldes kennzeichnen, der für die Feldanwendung überhaupt in Frage kommt. Diesen Bereich zeichnen wir als Begrenzung ein.
Es gibt jetzt zwei Möglichkeiten, den Bereich für die Feldanwendung zu kennzeichnen. Einmal können wir eine Feldbegrenzung – eventuell ist diese schon digital vorhanden – in einem GIS-Tool dahingehend bearbeiten, Schutzgebiete entsprechend zu markieren und von der Schlagbegrenzung zu subtrahieren. Diese Daten können dann als Shapefile oder Geojson in Pix4Dfields importiert werden.
Zum zweiten kann man auch in Pix4Dfields den Anwendungsbereich einzeichnen. Die Schlagbegrenzung kann hier in mehreren Teilflächen als sogenanntes Multipolygon beschrieben werden. Zur besseren Orientierung zu den Dimensionierungen helfen uns zusätzliche Abstandsmarkierungen.
Dieses Multipolygon möchten wir nun als Schlagbegrenzung nutzen. Dazu exportieren wir das Multipolygon und importiere es als Feldgrenze. Mithilfe der Feldgrenze kann nun das Orthomosaik entsprechend zugeschnitten werden. Als Resultat sind unsere Insektenschutzgebiete von der Planung der Feldanwendung wie gewünscht ausgenommen.
Indexkarten
In Vorbereitung auf den nächsten Schritt sehen wir uns die Ungleichmäßigkeit an, die wir hier in den Bilddaten sehen. Ohne nähere Kenntnisse der Umstände des Anbaus können wir dazu leider wenig sagen. Bodenverhältnisse, Krankheiten, Wassermangel, Nährstoffmangel, Unkrautnester, Schädlingsbefall – die Gründe können vielfältig sein und die Erfahrung des Landwirts ist gefragt.
Grundsätzlich gilt es, den Ertrag zu sichern, aber gleichzeitig den Eintrag von Chemikalien in die Umwelt so weit wie möglich zu minimieren. Das gilt für jede Art von Anwendung, ob nun Düngung, Wachstumsregler oder Herbizide.
In unserem Beispiel nehmen wir mal an, unsere Entscheidung ist es, Stickstoff zu düngen. Die Düngeverordnung macht uns hier genaue Vorgaben abhängig von Vorfrucht, Ertragserwartung, Sorte und Standort. Wir stellen eine Beispielrechnung auf und gehen von maximal 160 kg/ha Reinstickstoff für den Schlag aus, die wir aufteilen wollen in 3 Gaben. Die Düngeverordnung macht keine Aussagen, wie diese Gesamtmenge auf dem Schlag verteilt wird, so dass sich hier ein Spielraum ergibt, mehr oder weniger pro Teilfläche auszubringen je nach Bedarf, solange die Gesamtstickstoffmenge für den Schlag verordnungskonform ist.
Anwendungskarten
Die Ungleichmäßigkeiten, die deutlich im NDVI zu sehen sind, helfen uns nun, die Düngung teilflächenspezifisch zu planen. Wer keine teure Multispektralkamera zur Verfügung hat, kann auch mit einer preiswerten Consumer-Fotodrohne arbeiten, aus den RGB-Karten einen TGI-Index in Pix4Dfields berechnen und wird in der Regel auch hier Wachstumsunterschiede schon gut erkennen können.
Auf Grundlage dieser Indexkarten möchten wir zunächst Teilflächen mit ähnlichem Profil zusammenfassen. Wir wählen dazu im Zonenwerkzeug von Pix4Dfields vier Abstufungen in normaler Auflösung.
In unserem Beispiel planen wir eine Startergabe von 70 kg N/ha, bei 45,28 ha Schlaggröße ergibt das maximal 3.2 t Reinstickstoff, bzw. wenn mit KAS gedüngt wird 11.8 t Gesamtdüngermenge. Diese verteilen wir auf die 4 Zonen. Als ersten Ansatz wählen wir Abstufungen von 10-15%. Bereiche mit guter Entwicklung wollen wir weniger düngen und schwächere Bereiche fördern, bei der zweiten und dritten Gabe drehen wir das Schema dann um. Pix4Dfields rechnet dabei den Gesamtbedarf aus. Wir ändern die Zahlen so lange, bis wir ca. 11.8 t erreichen. Danach exportieren wir die Daten in einem geeigneten Format auf einen USB-Stick für das Terminal und die Düngung kann starten.
Wissenschaftler, Züchter, Agrochemieunternehmen und Landwirte nutzen Feldversuche seit langem um die Wirkung ausgesuchter Anbautechniken (z. B. Düngung, Sorten, Pflanzenschutz, Bodenbearbeitung) auf Pflanzen, Boden und Atmosphäre testen zu können [6]. Ein Feldversuch ist im Allgemeinen so gestaltet, dass er statistisch gesicherte Ergebnisse ermöglicht. Dazu sind Messungen, Zählungen und Bonituren nötig, die teilweise einen erheblichen personellen und technischen Aufwand bedeuten.
Fernerkundung und bildbasierte Techniken können dabei wesentliche Vorteile gegenüber manuellen Bewertungsverfahren bieten:
Quantitativ und qualitativ, maschinell ermittelte Daten reduzieren menschliche, individuelle Fehlerquellen und führen zu einer Objektivierung der Versuchsauswertung.
Bildbasierte Techniken und Softwarewerkzeuge ermöglichen einen hohen Grad an Automatisierung bei der Datenerfassung und -verarbeitung.
Drohnengestützte Fernerkundung kann im Vergleich zu manuellen Prozessen ein größeres Gebiet der Versuchswesens schneller und frequenter erfassen.
Die Fernerkundung kann das gesamte Gebiet einer Versuchsfläche messen, nicht nur die vom Feldarbeiter individuell ausgewählten Punkte.
Fernerkundungsdaten werden im Laufe der Zeit und unter verschiedenen Umweltbedingungen vergleichbar.
Drohnengestützte Fernerkundung kann dabei mehrere Aspekte der Phänotypisierung und botanischen Bewertung adressieren:
Flächenmessungen in multispektralen Orthomosaiken geben einen genauen quantitativen Überblick über Biomasse, indirekte N-Verteilung, Stressfaktoren oder Trockenmasse.
Photogrammetrische Techniken helfen bei der präzisen Berechnung der Wuchshöhe auf einem Feld oder einer Versuchsparzelle. Im Vergleich zu Laserscannern ist diese Lösung kosteneffizienter und bietet eine höhere Datenauflösung.
Statistische Mittelwerte und Standardabweichungswerte für Indexkarten und digitale Oberflächenmodelle lassen sich automatisch ermitteln.
Spezielle Indizes ermöglichen die Quantifizierung des Bedeckungsgrads der Parzellen.
Hochauflösende Orthomosaike ermöglichen eine präzise Zählung von Pflanzen oder sogar Blättern.
In einem zehnmonatigen Projekt hat Pix4D in Zusammenarbeit mit dem Institut für Agrar- und Stadtökologische Projekte an der Humboldt-Universität zu Berlin (IASP) wurden Methoden der Fernerkundung im Feldversuchswesen anhand typischer Mess- und Bonituraufgaben auf der Versuchsstation Berge in Brandenburg getestet und mit herkömmlichen Ansätzen verglichen.
Es geht hierbei weniger um die wissenschaftliche Auswertung konkreter Feldversuche als vielmehr um die Bewertung der technologischen Methodologie.
Technologische Grundlagen
Feldversuche
Wissenschaftliche Feldversuche dienen dem Ziel den Einfluss einer Anbautechnik auf Pflanzen, Boden und Atmosphäre vergleichend bewerten zu können. Biologische Systeme sind räumlichen und zeitlichen Schwankungen unterworfen. Die wissenschaftlich korrekte Durchführung eines Feldversuches muss deshalb immer auf die räumliche Variabilität landwirtschaftlicher Flächen eingehen. Dazu werden die zu vergleichenden Anbautechniken (Düngung, Sorte, Bodenbearbeitung etc.) parzellenweise variiert und wiederholt in einem Feldversuch angeordnet. Da sich die Untersuchungen auf den definierten Raum der Parzelle beziehen, ist ihre (Zentimeter-) genaue räumliche Abgrenzung wichtig. Die Bewertung der untersuchten Anbautechnik erfolgt auf Basis der gemessenen, gezählten und bonitierten Merkmale. Eine statistische Verrechnung ermöglicht es, signifikante Unterschiede festzustellen.
Seit jeher wird in Feldversuchen spezielle Versuchstechnik eingesetzt, da die hier gestellten Anforderungen oft andere sind als die in der sonstigen Landwirtschaft. Gleiches gilt für den Einsatz von Drohnen im Versuchswesen. Die Anforderungen an Drohnen im Versuchswesen unterscheiden sich insbesondere hinsichtlich der möglichen Auflösung und der erreichten Genauigkeit der georeferenzierten Positionierung. Die zu befliegenden Flächengrößen sind dagegen meist deutlich geringer als jene in der Landwirtschaft.
Drohnenbasierte Photogrammetrie
Die Beschreibung photogrammetrischer Methoden geht zurück auf die 1850er Jahre. Erste mechanische photogrammetrische Systeme sind seit Ende des 19. Jahrhunderts bekannt. Doch erst mit der Einführung leistungsstarker Computer ist es möglich, große Bilddatenmengen in angemessener Zeit zu verarbeiten. Softwarealgorithmen berechnen dabei über die Erkennung wiederkehrende Eigenschaften von Einzelaufnahmen einer Szenerie aus unterschiedlichen Blickpunkten 3D-Punktwolken, Orthomosaiken oder Vermaschungen (siehe auch [2]-[5]).
Obwohl photogrammetrische Methoden mit einer Vielzahl von unterschiedlichen Kameras und Sensoren möglich sind (Digitalkamera, Handykamera, Luftbildkamera im Flugzeug, Multispektralkamera, Rigsysteme, …), gelten unbemannte, preiswerte Luftfahrzeuge – Drohnen – als wesentlicher technologischer Impuls der rasanten Entwicklung der letzten Jahre. Drohnen wiederum wurden erst ermöglicht durch einen Durchbruch in der Batterie- und Motorentechnologie. Nur Lithium-Polymer-Batterien haben ein hinreichend kleines Gewicht, große Energiedichte und Leistungsabgabe, um Drohnen in der Luft zu halten. So bildet die Verfügbarkeit von Digitalkameras, leistungsstarken Prozessoren, preiswertem Speicher und Drohnen die technologischen Grundlagen für eine breite Anwendung der Photogrammetrie in der Vermessung, Bau, Bergbau, Landwirtschaft, Infrastrukturinspektion und vielem mehr. Der Zeitpunkt dieser Entwicklung lässt sich auf die Jahre 2010-2013 festlegen.
Zukünftig werden sich durch preiswerten, cloudbasierten, nahezu unbegrenzten Speicher und Rechenleistung weitere Anwendungsfelder ergeben. Machine-Learning basierte Klassifizierungsmethoden werden zu einem maschinellen Verständnis in digitalen Karten und 3D-Modelle führen und die Entwicklung entscheidungsunterstützender Systeme auch in der Landwirtschaft ermöglichen.
Multispektrale Bildanalyse
Wenn die von der Sonne ausgesandte elektromagnetische Strahlung auf die Erdoberfläche trifft, werden Teile der Strahlung reflektiert und anderer Teile absorbiert. Das Reflexionsvermögen ist eine charakteristische Eigenschaft, die genutzt werden kann, Materiale zu identifizieren und zu klassifizieren. Zum Beispiel absorbieren gesunde Pflanzen vor allem den roten und blauen Anteil des sichtbaren Lichtspektrums, da Chlorophyll diese Teile des Lichts in der Photosynthese als Energiequelle nutzt. Gleichzeitig reflektieren sie viel stärker den Nahinfrarotbereich.
Gestresste Pflanzen ändern ihre spektrale Reflexionssignatur. Sie reflektieren stärker den sichtbaren Bereich des Spektrums und weniger den Nahinfrarotbereich. Auch ist die Steigung im Übergang von niedrigen Werten im visuellen zu höheren Werten im Nahinfrarotbereich weniger steil. So haben Böden typischerweise ein flaches Spektrum ohne einen ausgeprägten Übergang zwischen visuellem Bereich und Nahinfrarot.
Multispektrale Bildanalyse umfasst die Messung von Multispektralsensordaten, die Erzeugung präziser Orthomosaiken für Reflektion und Indizes, sowie die agronomische und statistische Auswertung der digitalen Reflektions- und Indexkarten (siehe [1]).
Lidar
Lidar-Sensoren emittieren Laserstrahlen und erfassen die Reflektion des Lichts des untersuchten Objekt. Die Zeitdifferenz zwischen Laseremission und Sensormessung wird genutzt, um die Entfernung eines Bildpunkts zu bestimmen.
Bei UAV-basierten Lidar-Messungen für eine landwirtschaftliche Anbaufläche werden die Laserstrahlen von unterschiedlichen Ebenen des Bewuchses reflektiert. Das Sensorbild liefert eine 3D-Tiefenstruktur. Insbesondere bei Anwendungen in der Forstwirtschaft lassen sich so Art, Form und Anzahl der untersuchten Bäume einer Fläche bestimmen, sowie das unterliegende Höhenprofil.
Thermografie
Bei der Thermografie wird die Infrarotabstrahlung eines Objekts sensorisch bestimmt und als Temperatur des Objekts interpretiert.
Thermalsensoren können ebenfalls in Drohnen verbaut werden und mit z.B. dem Softwaretool Pix4Dmapper zu 3D-Modellen und Orthomosaiken verarbeitet werden.
Thermalsensoren können im Feldbau dazu dienen, Trockenstress zu erkennen.
Drohnen und Sensorik
Im Rahmen der Versuche kamen folgende Drohnen mit RGB- und Multispektral-Sensorik zum Einsatz:
Vergleich mit bisherigen Zähl-, Mess-, und Boniturmethoden
Neben Messungen und Zählungen werden Merkmale in Pflanzen bonitiert. Eine Bonitur ist eine fachgerechte, qualitative Beurteilung landwirtschaftlicher Betrachtungsobjekte. Im Feldversuchswesen werden Bonituren durchgeführt, um Parameter des Wachstums und der Entwicklung von Pflanzen aufnehmen zu können, die nicht oder nur mit großem Aufwand direkt gemessen oder gezählt werden können. Die Qualität der Bonitur ist abhängig von der Erfahrung und Fachkompetenz der Bonitierenden aber auch von der physischen (Sehvermögen) und mentalen (Müdigkeit) Verfassung. Für die Weiterverarbeitung der in einer Bonitur erzeugten Daten (z.B. statistische Verrechnung) werden meist vorab Boniturnoten definiert (z. B. 0 – 9), die dann, während der Bonitur entsprechend der Merkmalsausprägung vergeben werden.
Im Folgenden wird anhand von drei Feldversuchen exemplarisch gezeigt, wie Drohnen bei der Datenerfassung in Feldversuchen eingesetzt werden können. Insbesondere wird auf die Mess- und Boniturparameter
Allgemeiner Zustand der Parzellen (Z. b. Stand nach Winter, zeitliche Veränderungen im Pflanzenwachstum)
Pflanzenzählungen
Höhenmessung
Homogenität
eingegangen.
Pflanzenzählung bei Sonnenblumen Mai 2020 – Oktober 2020
Versuchsbeschreibung
Die Verteilung von Pflanzen auf einer Versuchsfläche ist wesentlich von der Verteilung des Saatgutes, dem Feldaufgang, und der nachfolgenden Beschädigung aufgelaufener Pflanzen durch Schaderreger abhängig. Grundsätzlich ist eine gleichmäßige Verteilung von Pflanzen vorteilhaft, die jeder Einzelpflanze einen definierten Standraum zuweist. Auf einem sandigen Boden der Versuchsstation Berge (Havelland) wurden Sonnenblumen in Reihenabständen von 75 cm angebaut. Die Zählung der Pflanzen erfolgte im Vier- bis Sechsblattstadium manuell auf definierten Streckenabschnitten der Reihenkultur. Dabei sollten nur die Kulturpflanzen und nicht etwaige Unkräuter berücksichtigt werden.
Zählung der Pflanzenanzahl
Das Sonnenblumenfeld wurde mit einer DJI Phantom 4 in einer Höhe von 7 m beflogen. Das Orthomosaik wurde mit Pix4Dfields erzeugt und hat eine Auflösung von 0,2 cm / Pixel. Die Schattierung resultiert aus wechselnder Bewölkung während der Befliegung. Mithilfe des Softwareprodukts Global Mapper wurde ein Bereich von 2 m x 2 m frei an verschiedenen Orten platziert, um die Anzahl von Pflanzen zu zählen und die Keimrate zu beurteilen.
Ergebnis: Mit Hilfe der Drohne gelang es, die Sonnenblumen-Pflanzen zu zählen und die Abstände der Pflanzen innerhalb einer Reihe zu erfassen. Nur in wenigen Fällen unterschieden sich die manuellen Zählungen von der Erfassung per Drohne. Wo zwei Pflanzen direkt nebeneinander standen erschienen diese bei der Zählung per Drohne als eine Pflanze. Außerdem wurden Unkräuter, die in der Drillreihe standen und in Form und Farbe der Sonnenblumen ähneln, als Sonnenblumen gezählt. Es ist deshalb davon auszugehen, dass die Genauigkeit der Zählung per Drohne sinkt, je mehr Pflanzen in sehr geringem Abstand voneinander stehen und je mehr störende Strukturelemente Elemente (Unkraut, Steine) vorhanden sind. Dem kann mit einem erhöhten Aufwand bei der Befliegung und Nachbearbeitung begegnet werden.
Bonitur des allgemeinen Zustandes von Parzellen im Winterroggen Oktober 2019 – Juni 2020
Versuchsbeschreibung
Um die Wirkung diverser Biogas-Gärreste auf den Boden und auf das Pflanzenwachstum zu bestimmen, wurde 2011 ein Feldversuch mit einer Grünroggen-Silomais-
Grünroggen-Sorghumhirse Fruchtfolge angelegt. Seitdem werden regelmäßig Parameter des Wachstums und der Entwicklung aufgenommen. Zu den regelmäßigen Bonituren gehört auch die visuelle Inaugenscheinnahme, um den Wachstums- und Entwicklungsfortschritt der Pflanzen sowie Unregelmäßigkeiten in den Parzellen bewerten zu können. Die Bonitur des allgemeinen Zustandes der Parzellen dient auch der Qualitätskontrolle von Versuchen. Im Folgenden wird dargestellt, wie diese Aufgabe mit Hilfe einer Drohne erledigt werden konnte.
Zeitlicher Vergleich des Pflanzenwachstums
Der Versuch zum Winterroggen vom 31.3.2020 und vom 21.4.2020 wurde visuell verglichen. Die Bilder wurden mit einer DJI Phantom P4 ohne RTK aufgenommen und mit Pix4Dmapper verarbeitet. Die Georeferenzierung erfolgte mit QGIS über die Zuordnung charakteristischer Geländepunkte.
Die Befliegungen ließen sich bei guten Witterungsbedingungen durchführen. Starker Wind ab ca. 35 km/h führte in unseren Versuchen dazu, dass die Einzelbilder der Parzellen sich so stark voneinander unterschieden, dass diese nicht mehr zu einem Orthomosaik zusammengefügt werden konnten.
Ergebnis: Auf den mit der Drohne produzierten Bildern sind Unregelmäßigkeiten (Stellen mit geringer Anzahl Pflanzen) in den Parzellen gut zu erkennen. Der Wachstums- und Entwicklungsfortschritt lässt sich ebenfalls ausreichend genau abschätzen. Die regelmäßige manuelle Inaugenscheinnahme der Parzellen lässt sich durch den Einsatz der Drohne grundsätzlich ersetzen. Ein Vorteil der Drohne ist dabei die Draufsicht, bei der sich Lücken auch in der Mitte einer Parzelle gut erkennen lassen während der Betrachter vor Ort die Pflanzen nur in einem bestimmten Winkel sieht. Insbesondere bei hohen Pflanzen ergibt sich hier ein Vorteil.
Messung der Pflanzenhöhe und Biomasse von Roggen
Das Versuch mit Winterroggen wurde mit einer DJI Phantom 4 am 21.4.2020 in einer Höhe von 15 m beflogen. Mithilfe von Pix4Dcloud wurde das digitale Höhenmodell (DSM) berechnet und anschließend in Global Mapper importiert. Dort wurden die zu untersuchenden Parzellen ausgeschnitten und die Histogramme erstellt. Die Histogramme können in verschiedenen Auflösungen berechnet und exportiert werden. In z.B. Microsoft Excel lassen sich dann Mittelwerte und Standardabweichungen berechnen. Die Wuchshöhen dicht beieinander liegender Parzellen können quantitativ verglichen werden.
Ergebnis: Die Datenerhebung und Berechnung sind vergleichsweise einfach. Es wird keine spezielle (und teure) Lidarsensorik benötigt. Einfache Kameradrohnen liefern bereits gute Resultate in hoher Datendichte. Anders jedoch als bei Lidarmessungen werden bei der photogrammetrischen Messung nur die sichtbaren Punkte verarbeitet. Ist der Boden nicht sichtbar, fehlt die Referenzhöhe für die Wuchshöhenmessung, was insbesondere problematisch ist, wenn das Terrain des Versuchs uneben oder abschüssig ist. Hier können digitale Oberflächemodelle helfen, die ohne Bewuchs erfasst und berechnet wurden. Wenn z. B. bei der Aussaat der Parzellen ein RTK-Lenksystem eingesetzt wird, ist eine ausreichend genaue Aufzeichnung der Höhe der Antenne über NN möglich. Die so erzeugte Höhenkarte kann als Basis für die Höhenberechnung einzelner Parzellen verwendet werden. Die Differenz der Höhenmodelle liefert die absolute Pflanzenhöhe. Gegebenenfalls müssen zusätzlich Fehler der vertikalen GNSS-Messung korrigiert werden.
Über Volumenmessungen lässt sich die Biomasse der Parzellen qualitativ abschätzen.
Bedeckungsgrad
Auf einem multispektralen Orthomosaik wird ein NDVI-Index in Pix4Dfields berechnet. Ein Teil des Spektrums, der charakteristisch für Boden ist, wird maskiert. Eine Analyse der Histogramme der einzelnen Parzellen (wie schon oben beschrieben) lässt Rückschlüsse auf den Bedeckungsgrad des Versuchs zu.
Ergebnis: Bislang wird der Bedeckungsgrad von Parzellen meist in einer zeitaufwändigen Bonitur festgestellt. Aus RGB-Bildern und aus multispektralen Sensordaten lassen sich relativ einfach qualitative Aussagen zum Bedeckungsgrad einer Kultur gewinnen. Die Auswahl des Index sowie die Eingrenzung der Histogrammwerte sind von Fall zu Fall unterschiedlich, können aber recht einfach interaktiv gefunden werden. Die Maskierung des Bodens kann auch verwendet werden, um Indexmessungen sowie statistische Messungen auf den Bewuchs einzuschränken.
Indexmessungen
Es soll untersucht werden, ob die Biomasse der einzelnen Parzellen und deren zeitliche Veränderungen mit multispektralen Messmethoden quantifiziert werden können.
Das NDVI wurde mithilfe einer Parrot Bluegrass und einer Sequoia Multispektralkamera aufgenommen. Das NDVI wurde mit Pix4Dfields berechnet. Georeferenzierung und Nachbearbeitung erfolgte mit Global Mapper. Die NDVIs zeigen eine leichte Grünverschiebung entsprechend der Versuchentwicklung über einen Monat. Die Histogrammverteilungen korrelieren mit den visuell sichtbaren Unterschieden der Parzellen und können als csv-Dateien für die statistische Auswertung exportiert werden.
Ergebnis: Die Histogrammdaten korrelieren mit dem sichtbaren Wachstumsfortschritt der Parzellen. Die Standardabweichungen der Verteilungen beschreiben gut die Homogenität der Parzellen. Die Verarbeitung der Daten erfordert allerdings viele wiederkehrende Softwarearbeitsschritte. Hier wäre ein höherer Grad der Automatisierung wünschenswert.
Hirse Mai 2020 – Oktober 2020
Versuchsbeschreibung
Im zuvor beschriebenen Versuch mit Winterroggen wurde nach der Ernte im Mai 2020 Sorghumhirse angebaut. Wachstum und Entwicklung sind im Versuch durch differenzierte organische und mineralische Düngung beeinflusst.
Höhenmessung
Die photogrammetrische Höhenmessung im Hirseversuch gestaltete sich schwieriger als im Roggenversuch. Die Pflanzen stehen in größeren Abständen. Die Pflanzen sind sehr verschieden groß. Die Größenverteilung ist inhomogen.
Zur möglichst umfassenden Bestimmung dieser Eigenschaften wurde die Versuchsfläche in einer Höhe von 10m mit einer DJI Phantom 4 beflogen, um eine besonders hohe Datenauflösung zu erzielen. Die Eingangsbilder mit einer niedrigen Subzentimerter-GSD (Ground Sampling Distance) wurden in Pix4Dmapper verarbeitet, um eine 3D Punktwolke und ein digitales Höhenmodell zu berechnen.
Ergebnis: Erfolgt die Datenerhebung mit einer zu großen GSD, d.h. in einer zu großen Flughöhe, kann das digitale Höhenmodell des Versuchs nicht hinreichend genau berechnet werden. Einzelne Merkmale der Pflanzen werden nicht erfasst und Messungen in der Punktwolke sind nicht möglich.
Kompatibilität zu bestehender Feldversuchstechnik
Bei Verwendung einer Drohne im Versuchswesen stellt sich die Frage, wie sich diese Technik in vorhandene Versuchstechnik integrieren lässt. Auf vielen Versuchsstationen sind inzwischen RTK-Lenksysteme und spezielle Software zur Erstellung von Parzellenplänen verfügbar. Insbesondere die Aussaat und die Düngung wird meist auf Basis, der auf der Versuchsfläche erzeugten oder vorab definieren AB-Linien durchgeführt. Diese Linien oder auch shp-Dateien aus der Software zur Erstellung des Parzellenplans lassen sich auch für die Drohne nutzen. Zu beachten ist dabei, dass RTK-fähige Drohnen das Korrektursignal von einem Server beziehen und Versuchsstationen oftmals eigene Referenzstationen nutzen, die per Funk mit den Fahrzeugen verbunden ist. Um eine hohe Genauigkeit zu erreichen, empfiehlt es sich daher, für alle Nutzer des Korrektursignales eine einheitliche Quelle zu verwenden.
Fazit
Drohnenbasiertes Remotesensing führt zu einer Objektivierung der Messergebnisse bei bestimmten Boniturmethoden. Preiswerte Drohnenmodelle und Sensorik ab ca. 700 EUR liefern bereits sehr gute Daten zur Analyse der Pflanzenanzahl, Bedeckungsgrad, Höhe und Homogenität. Drohnenmodelle ab ca. 5.000 EUR ermöglichen durch die Verwendung von RTK zentimetergenaue Messungen und damit zeitliche Vergleichbarkeit der Daten ohne zusätzlichen Aufwand zur Georeferenzierung. Multispektralsensorik erlaubt in dieser Preisklasse qualitative Messungen der Biomasse und Stressfaktoren.
Die Datenauswertung erfolgt manuell interaktiv, ist zeitaufwendig und erfordert aktuell die Verwendung unterschiedlicher Softwaretools. Der Austausch der teilweise sehr umfangreichen Daten zwischen den Tools ist dabei teils aufwendig. Automatisierte Auswertungsschritte sind nur ansatzweise verfügbar.
Beide Aspekte sollten zukünftig verbessert werden, um eine höhere Akzeptanz der Technologie im Feldversuchswesen zu erreichen.
[2] M. Cubero-Castan, K. Schneider-Zapp, M. Bellomo, D. Shi, M. Rehak, and C. Strecha: Assessment of the radiometric accuracy in a targetless workflow using Pix4D Software, 9th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), 2018.
[4] J. Vautherin, S. Rutishauser, K. Schneider-Zapp, H.F. Choi., V. Chovancova, A. Glass, and C. Strecha: Photogrammetric Accuracy and Modeling of Rolling Shutter Cameras. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences 3, 139-146, 2016
[5] C. Strecha, R. Zoller, S. Rutishauser, B. Brot, K. Schneider-Zapp, V. Chovancova, M. Krull, and L. Glassey: Quality assessment of 3D reconstruction using fisheye and perspective sensors. ISPRS Annals of Photogrammetry, Remote Sensing, and Spatial Information Sciences 2, 215-222, 2015.
[6] E. Möller-Arnold & E. Feichtinger: Der Feldversuch in der Praxis. Verlag von Julius Springer, Wien, 1929.
I have been learning improvisation with my trombone for a year now. This is a performance of Cantaloupe Island / Herbie Hancock together with my highly valued teacher Geoffroy Dabrock. Thank you, Geoffroy!
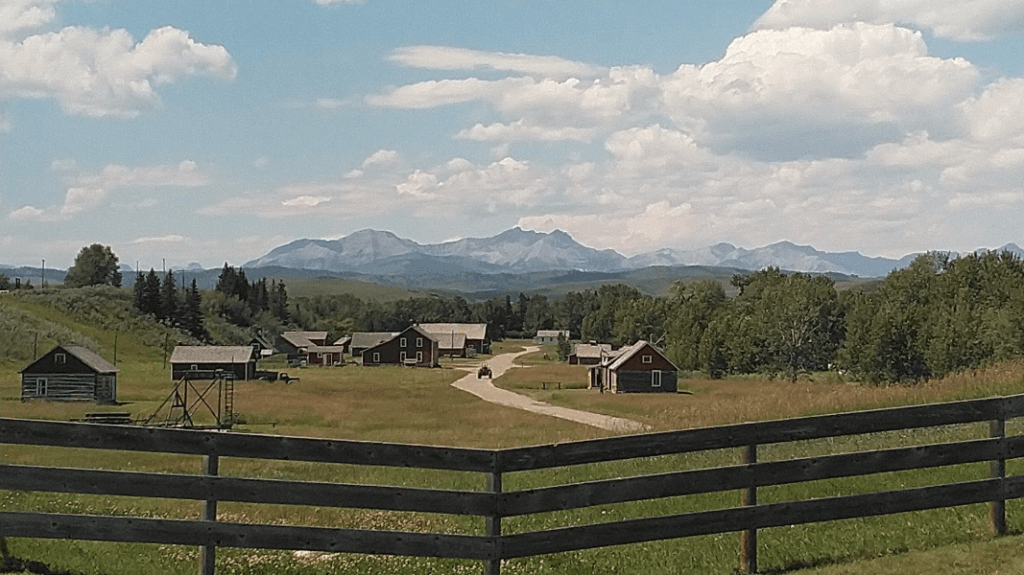
Wir verlassen die Rocky Mountains. Die Umgebung des Trans Canada Hwy ist flach und langweilig. Bevor wir in Calgary in Alberta, unserer letzten Station der Reise ankommen, machen wir einen Abstecher zur Bar U Ranch, einer National Historic Site, die an die großen Rinderzucht-Ranches des ausgehenden 19. Jahrhunderts erinnert – ein sehr sehenswertes Museum. Schauspieler zeigen, wie Hufeisen geschmiedet werden und erklären das Leben damals.
Bar U Ranch
Wir haben etwas Pech beim Sightseeing in Calgary. Der Fahrstuhl des Calgary Towers ist defekt. Niemand kommt hinauf. Und im Olympic Park weht der Wind zu stark, so dass die Sessellifte gesperrt sind. Wir probieren später noch alle Instrumente in den Bell Studios aus.
Viele Straßen in Calgary heißen Trails, obwohl es sich etwa um ausgewachsene Autobahnen handelt, als ob die Namensgebebung mit dem Wachstum der Stadt nicht Schritt gehalten hat.
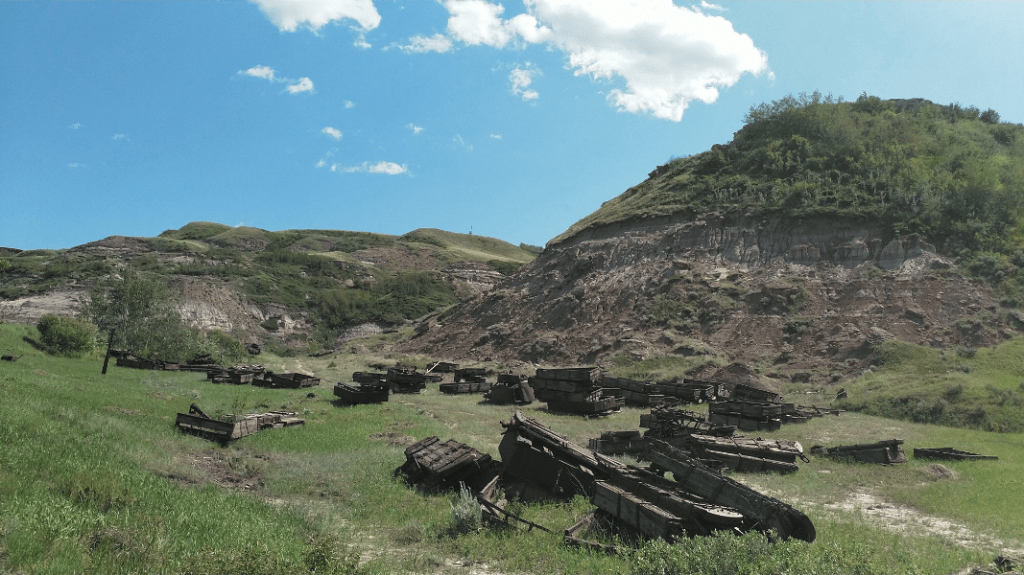
Am nächsten Tag machen wir einen Ausflug in die Badlands zum berühmten Royal Tyrrell Museum, um Saurierskelette zu bestaunen – ein großartiges Museum mit unzähligen Austellungsobjekten, viele direkt in der Umgebung der Badlands gefunden. In der Umgebung besichtigen wir Hoodoos und eine alte Kohlemine.
Im Tyrrell MuseumEisAtlas KohlemineHoodoosHorseshoe Canyon
So, das war’s jetzt erstmal. Morgen geht’s zurück. Ich gehe jetzt offline 😉
Wir verbringen 5 Nächte im Banff Nationalpark in Lake Louise. Der gleichnamige See gehört zum UNESCO Weltkulturerbe, ist wunderschön und eine Haupttouristenattraktion. Wir orientieren uns ein wenig am ersten Tag. Dann wandern A. und H. los vom Lake Louise über den Plain of Six Glaciers Trail zum Lake Agnes, dann zurück zum Lake Louise. Der Tag ist regnerisch, die Sicht begrenzt, aber abends verschwinden dann die Wolken und siehe da, aus unserem Apartment kann man sogar einen Gletscher sehen. C. und T. schlafen aus und gehen in den Pool.
Plain of Six Glaciers Panorama
Im NebelBeim OutlookLake LouiseLake AgnesAm Lake AgnesLake LouiseBlick aus dem Hotel
Abends sitzen wir am Lagerfeuer. Es gibt BBQ und Marshmallows.
Am nächsten Tag schlafen wir aus. Wir wollen hoch zum Lake Moraine. Das ist gar nicht so einfach. Es ist Sonntag, alle Busse sind voll, super Wetter und offenbar wollen heute alle zu den Seen. Dann klappt’s doch noch. Wir werden in einer Limousine hochgefahren und der Lake Moraine zeigt sich wie aus dem Bilderbuch.
Lake Moraine
Am nächsten Tag wollen A. und H. nochmal zum Lake Moraine und zum Lake Eiffel wandern. Das Wetter ist perfekt. Nur die An- und Abreise mit dem Bus ist nervig. Wir stehen nur an, erst 3,5h um hochzufahren, dann am Ende 1,5h um wieder zurückzukommen.
Die tolle Aussicht, Felsen, Schnee, Seen und die Sicht auf 3000er und Gletscher entschädigen für alles.
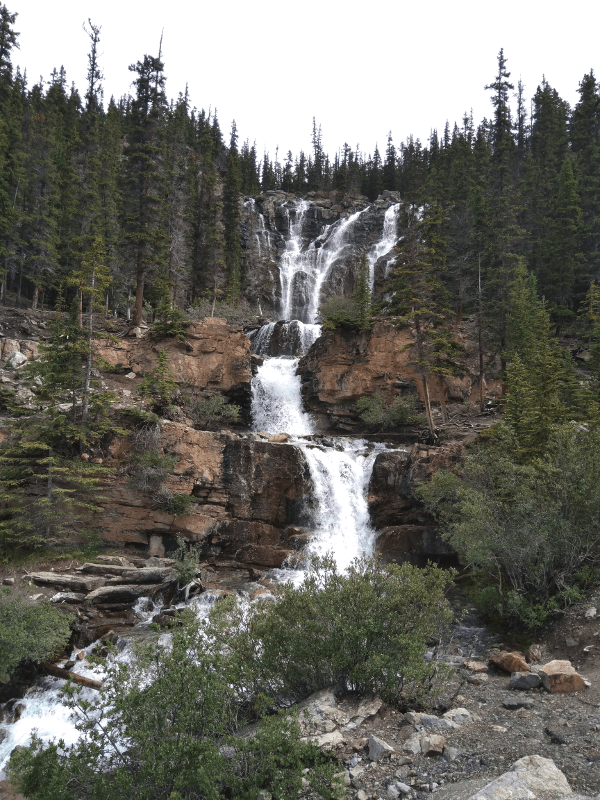
Der 230 km lange Icefields Parkway von Jasper nach Lake Louise ist eine der schönsten Straßen in den Rocky Mountains und entsprechend ein touristischer Magnet. Er führt vorbei an unzähligen Wasserfällen, Bergen, Flüssen, Seen und Gletschern. Bären und andere Waldbewohner sind am Straßenrand anzutreffen.
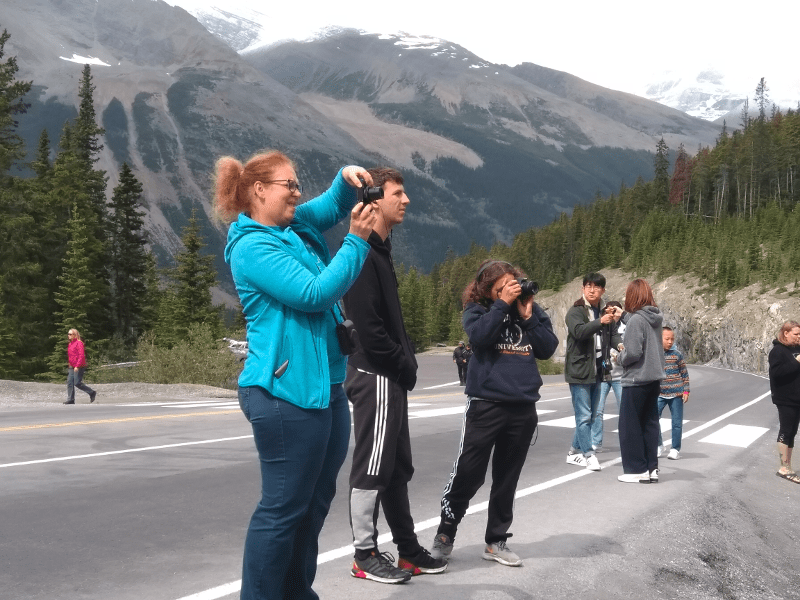
An schönen Tagen heißt es Schlange stehen und Geduld haben. Unser Tag war eher verregnet und weniger überlaufen. Gelohnt hat sich die Tour auf jeden Fall.
Auf dem Columbia Icefield sahen wir Busse hin und her fahren. Das ganze nennt sich Adventure Tour und kostet 100 CAD pro Person. Das ganze hat wenig Zukunft. Der Gletscher hier schmilzt genauso schnell wie überall sonst auf der Welt.
Athabasca FallsTangle FallsSunwapta FallsColumbia IcefieldDie 93 – der Icefields ParkwayWir kommen bei winterlichen 4.5°C in Lake Louise an.
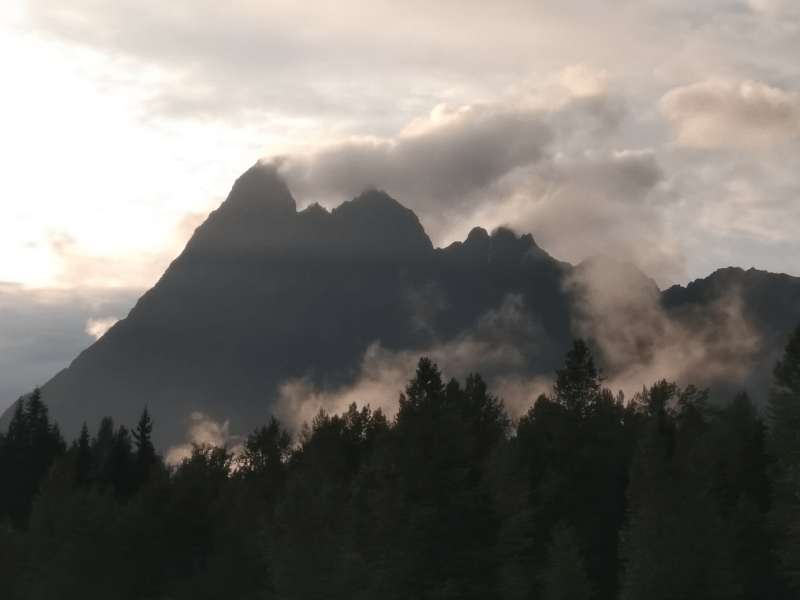
Wir machen Zwischenstation am Mount Robson, mit 3954 m dem höchsten Berg der kanadischen Rocky Mountains. Wir haben Glück und der Mount Robson zeigt uns seinen Gipfel, der sonst meist in Regenwolken gehüllt ist.
Mt RobsonYellowhead Hwy
Der Fraser River fließt durch das Robson Valley. Ganz in der Nähe unseres Quartiers sind die Rearguard Falls. Bis dahin schaffen es die stärksten Lachse vom Pazifik aus zum Leichen hierher. 9 km flußaufwärts befindet sich eine Raftingstation und wir beschließen, eine Tour zu buchen.
Die große Steuerfrau
Jasper und Umgebung erkunden wir am darauffolgenden Tag. Wir waschen unsere Wäsche im Ort. Dann geht’s die Maligne Lake Road hoch zum gleichnamigen See.
Irgendwie sehen fast alle Kiefern hier orange bis schwarz aus. Wir erfahren, dass der Borkenkäfer sich in den letzten Jahren stark vermehrt und riesige Kiefernbestände in Kanada befallen hat – auch eine Folge des Klimawandels. Die Gegend sieht hier aus wie der Thüringer Wald in den 80er. Die Tiere scheint’s noch nicht sehr zu stören. Überall an der Straße sehen wir Caribous und Schwarzbären.
Am nächsten Tag kündigt ein erstes fahles Leuchten über dem Mt Robson das Erwachen des Tages an. Es ist stockdunkel im Quartier, als der Wecker klingelt. Wir fangen an, unsere Ausrüstung für den Aufbruch vorzubereiten. Alle Bewegungen laufen schnell und präzise ab. Alle Handgriffe haben wir tausendfach trainiert, bis sie ganz ohne Denken funktionieren. Man könnte uns die Augen verbinden und alles würde in einem gleichen Automatismus ausgeführt werden wie unsere Atmung oder unser Herzschlag. Alle wissen, nur der früh aufbricht, hat eine Chance.
Denn heute werden wir die ersten auf dem Icefields Parkway nach Lake Louise sein!
Heute waren wir in Fort St. James, einem ehemaligen Hudson’s Bay Handelsposten in Westkanada. Es gibt hier eine National Historic Site, in der das Fort der Hudson’s Bay Company aus dem Jahre 1896 detailgetreu rekonstruiert ist. In den ersten Jahren der Besiedlung gab es gerade etwas mehr als 100 Westeuropäer in Kanada westlich der Rocky Mountains. Fort St. James war ein zentraler Punkt für den Handel zu dieser Zeit. Das Museum ist sehr interessant und das Café dort ist auch super.
Die Leute hier haben Humor und veranstalten täglich ein Hühnerrennen, beim dem Besucher Preise gewinnen können.
Sonnenuntergang am Stuart LakeUnd nochmal, weil es so schön war
Der Ort liegt am Stuart Lake, einem großen See, der 6 Monate im Jahr zugefroren ist. Seit ein paar Wochen ist er eisfrei und C. und H. waren heute baden.
Es wird hier im Winter bis zu -45°C kalt.
Das Geschäft mit den Bieberpelzen läuft ja nicht mehr so gut, nicht weil es keine Bieber mehr gibt, vielmehr weil die daraus hergestellten Hüte aus der Mode gekommen sind. Was machen die Leute hier so, insbesondere in all den Monaten im Winter?
CowgirlIm LagerhausNational Historic Site Fort St. JamesChicken Race
Hatte ich schon erwähnt, dass ich die Wizard-Partie heute gewonnen habe?
Ihr werdet euch sicher wundern, warum es so ruhig war die letzten Tage. Die Antwort ist einfach. Es gab kein Internet und auch keinen Strom. Wir waren irgendwo in der Nähe von Smithers im Bulkley Valley, ein paar Kilometer abseits, einer Schotterstraße entlang auf einer Farm. Dort hatte A. eine Cabin gebucht. Einen Kilometer entfernt ist ein See. Wir waren aber bisher nicht dort. Der Weg dorthin führt durch einen dichten Wald. Überall sind handflächengroße Bärenfährten zu sehen. Da bleiben wir lieber in der Cabin.
Marshmallows am LagerfeuerI.m.k. spielt Ukulele
Um uns vollständig in die hiesige Kultur zu integrieren, haben wir jetzt neue Namen angenommen. Rommé spielen wir trotzdem. Wie hoch ist die Wahrscheinlichkeit, 15 mal hintereinander jede Runde zu verlieren? So ein Ereignis kann tatsächlich auftreten.
Hier gibt es 2 Hunde, mit denen Frohsinn und Der-mit-der-Frisbee-tanzt spielen. Die eine heißt Riley und die andere Molly. Riley legt einen Stein vor einem ab, dann wartet sie, dass man diesen weit weg wirft. Dann bringt sie ihn wieder.
SunsetRileyKampf um die FrisbeeNach dem Regen
Später haben wir die Bären auch noch gesehen. Die waren so groß wie Pferde – ohne Quatsch.
Frohsinn und Heiterkeit rastenAuf dem Kitseguecla Lake
Am letzten Tag waren wir doch noch auf dem See unterwegs. Frohsinn war baden. Es riecht schon nach Neuschnee.
A. hat eine Expeditionstour für uns gebucht. Es geht um 8:30 los. Wenig Schlaf, egal.
Es geht mit einem schnellen Boot durch nebelverhangene tiefe Fjorde umgeben von dunklen Wäldern und Bergen. Am Ufer lassen sie sich nicht sehen. Dennoch wissen wir, dass tausend Augen jede unserer Bewegungen verfolgen. Der Wald ist so dicht, dass wir Stadtmenschen dort keinen Schritt gehen könnten und nicht eine Minute überleben würden. Gut, dass wir auf einem Boot sitzen.
Wir glauben, in der Ferne Trommeln und Gesänge zu hören. Doch sehen wir sie nicht.
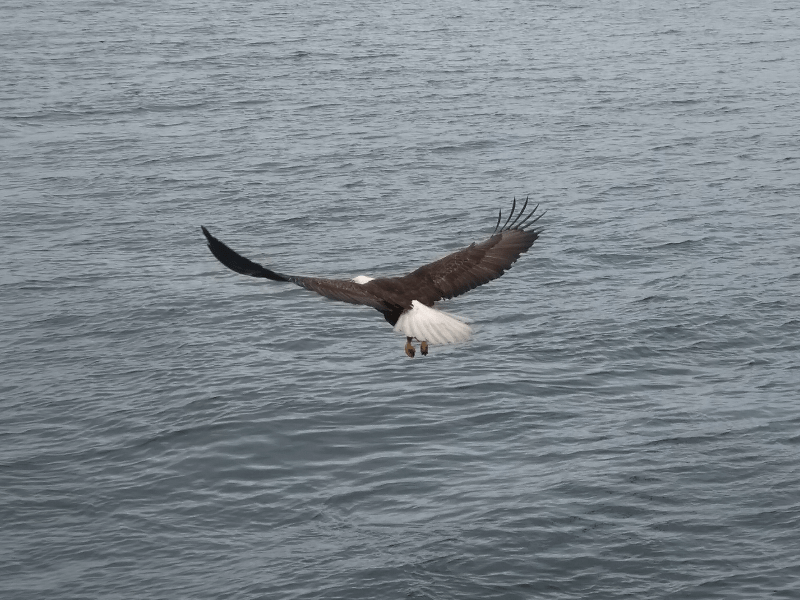
Khutzeymateen
Naja, wenigstens sehen wir noch Grizzlys, Wale, Weißkopfadler und so. Die Fahrt war ja nicht vergebens.