
The project objective was to build a self-stabilizing, flying quadrocopter that can be controlled remotely by a mobile phone, PC or joystick.
Components and wiring
In addition to the Teensy3.1, CC3000, 10DOF (L3G4200D, ADXL345, HMC5883L, BMP085) we have also a Ublox NEO-6M for GPS, 2 control LEDs and a Piezo beeper for status messaging.
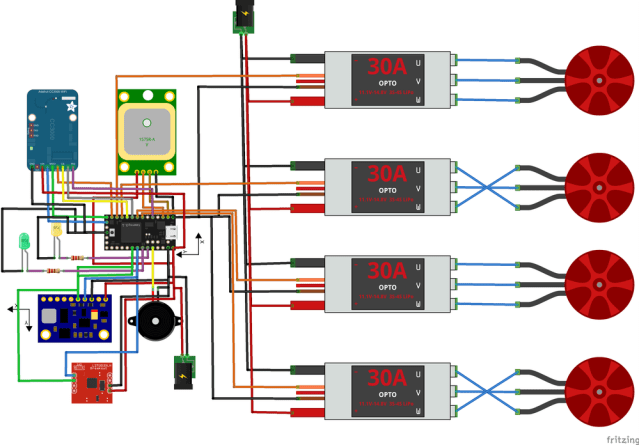
You may ask why we use in addition to the HMC5883L a second electronic compass (LSM303DLH). The reason is that the electronic compass on the main board is extremely sensible to the magnetic environment coming from the WiFi and ESC. I found a better place below the battery but that required to add the additional module. Also, the compass is very sensible to the vibrations from the motor. I used the same approach as with the tilt, to combine the compass measurement with the gyro with quite good results and low standard deviation in the measurement.
Here a few downloads to see the layout in Fritzing:
- Sketch
- Part for 10DOF module, see for example here at ebay
- Part for Ublox NEO-6M
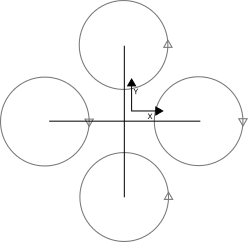
The software supports X-shape and cross-shape arm layouts. For the sake of simplicity I chose the cross style.
Some more information:
- Kalman, PID, ESC parameters:
HPR data : 0.000 -3.397 -1.313 PID data : 0.214 0.279 0.280 Heading PID data : 0.210 0.721 1.094 Kalman data : 0.195 0.021 18.156 MinMax data : 54.709 48.697 52.305 171.844 heading MinMax data : 3.439 7.623 5.579 8.417 Gyro calibration data : -14.680 -36.850 20.320 ESC data : 1050 900 2400 Low pass data : 0.227
- Private github repository
